آموزش طراحی ماشین الکتریکی
-
آپدیت شده در :

در راستای طراحی ماشین الکتریکی ابتدا باید بتوانیم کل ماشین را به صورت تئوری پیاده سازی نماییم، همین مسله باعث می شود که فرد طراح نیاز به دانش تخصصی سطح بالا در رشته مهندسی برق قدرت داشته باشد.
عموما این دانش در مقطع کارشناسی ارشد به اندازه کافی در اختیار مهندسین طراح قرار گرفته می شود، با این حال داشتن مدرک کارشناسی ارشد الزامی نبوده و بسیاری از دانشجویان خوش فکر در همان مقطع کارشناسی نیز می توانند در این زمینه گام بردارند.
همراه ما باشید تا با یکدیگر مروری دقیق داشته باشیم بر تمام فرآیند طراحی یک ماشین الکتریکی و در پایان نیز با استفاده از نرم افزار مکسول استاتور ژنراتور شار محور دو رتور – یک استاتور (شیاردار) را طراحی خواهیم نمود.
آنچه که در این نوشتار خواهید خواند؛
- طراحی یا شبیه سازی
- اصول طراحی ماشین الکتریکی
- تعیین اهداف کلی
- استخراج معادلات بنیادی
- شبیه سازی طراحی اولیه
- انتخاب روش بهینه سازی
- صحت سنجی و شبیه سازی نهایی
- فراتر از شبیه سازی
- بهینه سازی در شبیه سازی
- پیشبینی زمان اتمام پروژه
- آموزش عملی طراحی ماشین الکتریکی
- موتور الکتریکی ورنیر
- طراحی موتور ورنیر
- شبیه سازی ژنراتور شار محور در مکسول
طراحی ماشین صرفا در مورد موتور/ژنراتورهای دوار مطرح نمی شود بلکه تمام دستگاههای الکتورمغناطیسی را شامل می شود.
اگر به تاریخ نگاهی بیاندازیم متوجه تغییرات گسترده در ماشینهای الکتریکی چه از لحاظ نوع، کاربرد و بهبود آنها می شویم، اگر مهندس طراح وجود نداشت قطعا به این حجم از پیشرفت در ماشینهای الکتریکی نیز نمی رسیدم، با توجه به این مسئله مهندسین طراح همواره دارای جایگاه تخصصی بالا و البته درآمد بسیار خوبی بوده اند.
برای شروع آموزش ابتدا اجازه دهید برخی مسائل را به وضوح مشخص نماییم؛
طراحی یا شبیه سازی
متاسفانه اکثر افراد تصور می کنند طراحی همان شبیه سازی است! درحالیکه این چنین نیست و شبیه سازی یکی از مراحل پایانی طراحی می باشد.
با توجه به موارد یاد شده می توان به این صورت بیان داشت که ما در طی فرآیند طراحی درنهایت برای ارزیابی کار انجام شده محصول پایانی را شبیه سازی خواهیم نمود.
اصول طراحی ماشین الکتریکی
در ابتدا دقت داشته باشید که این روند برای تمام دستگاههای قدرت که به صورت کلی به آنها ماشین = Machine (ماشین الکتریکی، ترانسفورماتور، مبدل و …) گفته می شود یکسان می باشد.
رعایت قواعدی که در ادامه به عنوان روندهای طراحی ماشین ذکر می شوند در تمام مقاطع تحصیلی ثابت بوده و تنها مسئلهای که می تواند بروی کیفیت کار تاثیرگذار باشد سواد و تخصص طراح می باشد.
زمان به اتمام رساندن یک طراحی به فاکتورهایی مانند؛ دانش تخصصی، دانش نرم افزاری، نوع ماشین مدنظر (طول عمر آن و منابع در دسترس)، دقت انجام کار و اهداف نهایی بستگی دارد.

تعیین اهداف کلی
در اولین قدم باید هدف از انجام کار مشخص گردد، و سپس به سوالاتی مانند؛
علت و چرایی طراحی یک ماشین جدید چیست؟
مشکلی که برای آن اقدام به انجام چنین طراحی نموده ایم چیست؟
بودجه مالی ما در چه شرایطی می باشد؟
و …
پاسخ دهیم، سوالاتی که ظاهرا ساده می باشند و متاسفانه اکثر مهندسین به آنها بیتوجه بوده و در میانهی راه باعث به وجود آمدن مشکلات عدیدهای مانند؛ توصیه راهکارهای سادهتر توسط دیگران، چالشهای محیطی و طبیعی، کمبود بودجه تحقیقاتی و ساخت و … برخورد می کنند.
به عنوان مثال فرآیند طراحی و ساخت یک موتور الکتریکی جهت به حرکت درآوردن یک خوردو با طراحی یک موتور الکتریکی جهت استخراج آب از چاه به شدت متفاوت است، برای روشن شدن موضوع اجازه دهید این دو مورد را با یکدیگر مقایسه نماییم؛
خودرو الکتریکی

در این طراحی به یک موتور الکتریکی با حجمی بسیار پایین نیازمندیم پس توصیه می شود از نوع ورنیر استفاده شود، از آنجایی که در خودروهای الکتریکی از باتریهای قابل حمل استفاده می شود پس بازده کاری نیز بسیار حائز اهمیت می باشد، این مسئله درکنار اینکه نباید تلفات مکانیکی گیربکس نیز داشته باشیم (بدون گیربکس باشد) سبب می شود که موتور ما از نوع شار محور (Axial Flux) طراحی گردد.
مورد دیگر داشتن گشتاور راه اندازی بالا می باشد که با همان موتور ورنیر نیز تامین می گردد.
چاه آب
به دلیل محیط کاری خشن باید از یک موتور الکتریکی ستبر (robust) استفاده نماییم، درکنار این مورد به دلیل توان و وزن بالا، تعمیرات آن نیز باید به صورت سیار و در محل امکان پذیر باشد، موارد یاد شده قطعا انتخاب یک موتور القایی (آسنکرون) را تدایی می کند.
مسئله دیگر مانند گشتاور راه اندازی بالا نیز سبب می شود در میان موتورهای القایی از تیپ خاصی استفاده نماییم.
همانگونه که مشاهده نمودید با یک بررسی ساده تفاوتهای زیادی میان این دو موضوع به چشم می خورد به همین دلیل مرحله یک (تعیین اهداف کلی) یکی از مهمترین مراحل می باشد.
زمان مورد نیاز تعیین اهداف کلی
از آنجایی که این مرحله صرفا یک کار تحقیقاتی می باشد معمولا اکثر افراد از قبل کاربردهای مدنظرشان را مشخص کرده اند، اگر فرض کنیم که شما به هیچ وجه برای این مرحله وقت نگذاشته باشید با توجه به مقالاتی که باید مطالعه نمایید بین 3 تا 5 روز زمان خواهد برد.
استخراج معادلات بنیادی
با کمی اغماض، این مرحله را می توان سختترین مرحله دانست، در اینجا شما باید کتابها و بخصوص مقالات را به خوبی مطالعه کرده تا درنهایت بتوانید تمام معادلات یک ماشین را استخراج نمایید.
دقت داشته باشید هرچه ماشین مورد نظر جدیدتر باشد سختی این مرحله نیز به مراتب بیشتر خواهد بود، حتما توصیه می کنم مقالات این قسمت از نوع Transaction باشند و به ندرت از مقالات کنفرانسی استفاده نمایید.
به صورت میانگین برای استخراج معادلات یک ماشین نسبتا جدید نیاز به مطالعه دقیق 20 تا 30 عدد مقاله می باشد
در آینده نزدیک سعی می کنیم در پستی تفاوت میان مقالات Transaction با Conference را به صورت دقیق مطرح نماییم.
معادلات باید به گونهای باشند که از فرضیات ما مانند؛ توان ماشین، ولتاژ در دسترس، سرعت مدنظر و … استفاده کرده و درنهایت مجهولات ماشین مانند؛ تعداد دور سیم پیچی هر فاز زیر هر قطب (q)، سطح مقطع سیم، عمق شیار استاتور، ارتفاع یوغ شیار استاتور، دهانه شیار استاتور، طول، ارتفاع و عرض آهنربا (در صورت استفاده)، فاصله هوایی، شعاع داخلی و خارجی استاتور و رتور، طول موثر ماشین، چگالی میدان مغناطیسی فاصله هوایی، گشتاور، بازده نهایی، میزان تلفات، تعداد شیار استاتور، تعداد قطبهای استاتور و رتور، تعداد دور هر فاز استاتور، ضریب موثر قوس قطب آهنربا (نسبت قوس به گام قطب)، ضریب توان، ضریب توزیع سیم پیچی، ضریب گام سیم پیچی، ضریب مورب کردن شیار استاتور، ضریب سیم پیچی، قطر سیم پیچی هر فاز، مساحت هر شیار استاتور، بار پذیری مغناطیسی ویژه، ضریب انباشتگی شیار، گام قطب، گام شیار استاتور، ، پرمیانس فاصله هوایی و … را محاسبه نماید.
البته برخی موارد نیز مانند؛ ضریب کارتر، فرکانس کاری، زاویه الکتریکی گام شیار و سیم پیچی استاتور و … را بر اساس مقالات و جداول بر اساس نیازمان ثابت فرض می کنیم.
متاسفانه تعداد پارامترها و دادههای موردنیاز در نگاه اول ترسناک به نظر می آیند با این حال تمام موارد یاد شده به راحتی و با استفاده از معادلات ماشین مدنظرمان که از قبل اثبات شده اند قابل دستیابی می باشند.
اگر طراحی ماشین شما به عنوان یک پایان نامه باشد و استاد راهنما از شما اثبات روابط یادشده در مقالات را طلب نماید کارتان در این قسمت دشوارتر خواهد شد
به صورت کلی مواردی که باید در این مرحله دقت نمایید عبارتند از؛
- اطمینان از صحت معادلات بدست آمده
- تعیین مناسب ضرایب و ثابت ها
- استخراج تمام پارامترهای اساسی ماشین
- منطقی بودن دادههای بدست آمده (نیازمند تجربه)
- مشاوره با یک مهندس طراح
زمان موردنیاز استخراج معادلات بنیادی
معمولا این مرحله یکی از طولانیترین مراحل می باشد و با توجه به فاکتورهای یاد شده می تواند بین 2 تا 3 ماه به طول بیانجامد.
شبیه سازی طراحی اولیه

این مرحله کاملا اختیاری بوده و اگر شما جز مهندسین با تجربه در زمینه طراحی باشید قطعا نیازی به این قسمت نیست، هدف این مرحله صرفا صحت سنجی ماشین طراحی شده می باشد. بااین حال اگر دستی در طراحی ماشین داشته باشید با نگاهی کلی به دادههای بدست آمده متوجه خواهید شد که ماشین طراحی شده کار خواهد کرد یا خیر.
در این مرحله باید به سراغ نرم افزارهای المان محدود کامپیوتری نظیر؛ مکسول، فلاکس و … برویم و در آنها اقدام به پیاده سازی و شبیه سازی طرح اولیه نماییم.
همانگونه که پیشتر گفته شد؛ هدف ما در این مرحله صرفا صحت سنجی طرح اولیه می باشد این صحت سنجی نیز صرفا درحد اطمینان از چرخش موتور می باشد، با توجه به این موارد نیازی به چک کیفیت گشتاور، چگالی میدان مغناطیسی، میزان هارمونیکها و … نیست.
زمان مورد نیاز شبیه سازی طراحی اولیه
این قسمت تماما به توانایی تخصصی شما در کار با نرم افزارهای مهندسی برق بستگی دارد، اگر به خوبی بتوانید با این نرم افزارها کار نمایید در بدترین حالت بین 3 تا 6 روز زمان خواهد برد.
انتخاب روش بهینه سازی
انتخاب روش بهینه سازی به المانهای زیادی وابسته است، نحوه انتخاب یک روش مناسب را پیشتر در روشهای بهینه سازی در مهندسی برق به شکلی مفصل توضیح داده ایم.
روشهای بهینه سازی عمدتا پایه ریاضی داشته و باید تا حدودی با همهی آنها آشنا باشید، متاسفانه بعضا دیده می شود افراد بدون بررسی سایر روش هایی که می توانند برایشان نه تنها سریعتر بلکه پاسخی دقیقتر هم فراهم آورند، یک روش خاص را که دوستانشان از آن استفاده کرده اند انتخاب می نمایند.
با توجه به حجم بالای محاسبات در بهینه سازی ها، عمدتا روشهای احتمالی و برگرفته از طبیعت در این مرحله انتخاب می شوند.
روش الگوریتم ژنتیک (Genetic Algorithm) و بهینهسازی انبوه ذرات (Particle Swarm Optimization) در اکثر مواقع منتخبین این مرحله می باشند
زمان مورد نیاز انتخاب روش بهینه سازی
اگر مجددا تصور کنیم که شما هیچ گونه آشنایی با روشهای بهینه سازی و نحوه عملکرد آنها نداشته باشید، معمولا بین 5 تا 8 روز برای این مرحله باید درنظر بگیرید.
بهینه سازی
این قسمت نیز برای اکثر افراد چالش محسوب می شود چراکه باید ترکیب قدرتمندی از دانش روش بهینه سازی مدنظر و نرم افزار قدرتمند متلب را در کنار هم داشته باشند.
متاسفانه بسیار دیده می شود که افراد تا این مرحله خود را رسانده ولی به دلیل ترس از بهینه سازی پروژه را رها می کنند، درست است که ما آن را چالش می نامیم ولی لزوما هر چالشی با سختی همراه نیست!.
امروزه خوشبختانه نرم افزارهای مهندسی به قدری ساده و حرفهای شده اند که با زدن چند دکمه می توانید پروژه خود را به صورت کامل پیاده سازی نمایید، نرم افزار متلب نیز برای این مسئله در قسمت سیمولینک خود یک تولباکس نسبتا ساده برای مهندسین قرار داده است.

به عنوان مثال برای بهینه سازی پروژه با استفاده از الگوریتم ژنتیک کافیست تولباکس GA را باز کرده و معادلات مدنظرمان را در آن قرار دهیم، درنهایت با زدن دکمه “اجرا” بهینهترین حالت به شما نشان داده خواهد شد!.
البته راستش به این سادگی هم نیست!!، شما باید در ابتدا اهداف بهینه سازی را مشخص نمایید (بازده، حجم ماشین، چگالی میدان مغناطیسی و …) پس از آن با بررسی دقیق پروژه، پارامترهایی که قرار است بهینه سازی حول آنها انجام شود به همراه بازه مورد تاییدشان را تعیین نمایید.
بازه پارامتر یعنی محدودهای مشخص که الگوریتم بهینه سازی شما حول آن می تواند به پارامترها (طول ماشین، عمق شیار و …) مقدار دهد، قاعدتا برخی از این محدودیتها مثل طول ماشین بستگی به کاربرد ماشین مدنظر داشته و برخی دیگر نیز مانند چگالی میدان مغناطیسی یک حد مشخصی دارند چرا که مثلا اگر میدان ما بیش از 1.5 تسلا شود قطعا شاهد پدیده اشباع در ماشین خواهیم بود که قاعدتا خبر خوبی نیست.
با تمام این تفاسیر این مرحله نیز با داشتن دانش مورد نیاز قابل عبور می باشد و به هیچ وجه نباید به آن به چشم یک بن بست نگریست.
در نسخههای جدید متلب دیگر تولباکس optimtool در دسترس نخواهد بود و به جای آن باید از Optimization app alternative استفاده نمایید
زمان مورد نیاز بهینه سازی
این مرحله به دو قسمت تقسیم می گردد، قسمت اول در مورد پیاده سازی معادلات و مشخص کردن پارامترهای تحلیلی در فرآیند بهینه سازی می باشد و قسمت دوم نحوه پیاده سازی این معادلات در نرم افزار متلب است.
خوشبختانه قسمت دوم به دلیل تولباکسهای فراوان سیمولینک متلب زمان آنچنانی از شما نخواهد گرفت ولی قسمت اول قطعا نیاز به کار و تستهای زیادی داشته تا درنهایت بتوانید بهترین سناریو را برای بهینه سازی فرآهم آورید.
پیاده سازی کامل این مرحله با فرض آشنایی مقدماتی با نرم افزار متلب بین 10 تا 20 روز زمان خواهد برد.
صحت سنجی و شبیه سازی نهایی
بالاخره به آخرین مرحله از طراحی ماشین رسیده ایم، اگر مرحله “شبیه سازی طرح اولیه” را که اختیاری بود انجام داده باشید در این قسمت کافیست پارامترهایی که تغییر کرده اند را صرفا جایگزین کنید (مانند طول موثر ماشین، قطر ماشین و …).
اگر مرحله “شبیه سازی طرح اولیه” را انجام نداده باشید تمام کارهایی که در آن مرحله بیان شد را باید انجام داده و درنهایت در نرم افزارهای المان محدود ماشین خود را شبیه سازی (Simulation) نمایید.
در آموزش نرم افزار Ansys Maxwell تمرکز ما بیشتر بروی این مرحله می باشد، با این حال سعی می کنیم در فصلهای جدید وارد سایر مراحل نیز شویم.
فراتر از شبیه سازی
برخی مواقع طرح هایی در ذهن ما به وجود می آیند که شاید دلیل علمی محکمی پشت آنها نباشد به همین دلیل تحلیل تئوری آنها نه تنها سخت بلکه در نوع خود غیرممکن است، در این حالت شما مجاز هستید که بدون طی مراحل قبلی مستقیما در این مرحله حضور پیدا کنید و دقیقا آنچه که در تصور شما قرار گرفته است را پیاده سازی و تست نمایید.
تخیل مهمتر از دانش است، زیرا دانش محدود بوده اما تخیل تمام جهان را در بر می گیرد
آلبرت انیشتین
حقیقتِ پیشرفت علم، نه در مسائل ریاضی آن بلکه در تصورات ماست، به عنوان مثال نیکولا تسلا زمانی که ماشین القایی خود را طراحی نمود به هیچ وجه معادلاتی برای آن به شکلی که امروزه می دانیم در ذهن نداشت، او صرفا آنچه را که تصور می کرد را ساخت و به جرات قرن 20 را اختراع نمود![1]
به نظر بنده نرم افزارهای المان محدود به راستی پنجرهای جدید به سمت نوآوری در مهندسی برق می باشند، و همواره یک مهندس زمانی می تواند فراتر از آنچه که هست پیش رود که خود را از پیچیدگیهای امروزی جداسازد.
بهینه سازی در شبیه سازی
به لطف ویژگیهای خوب نرم افزارهای مهندسی می توانیم از آنها در بهبود طراحی نهایی نیز استفاده نماییم، متاسفانه همچنان برخی از اساتید دانشگاه با این مسئله مخالف هستند که علت آن قطعا سن و تفاوت نسلی آنها با دانش امروزی می باشد، بسیاری از اساتید دانشگاهی در زمانی دانش آموخته شده اند که به ندرت برنامههای کامپیوتری و یا خود کامپیوتر در دسترس بوده است به همین دلیل نگاه متعصبانهای به معادلات و تئوریهای بنیادی دارند. با این وجود برکسی پوشیده نیست که نرم افزارهای مهندسی مانند؛ متلب، دیگسایلنت،ایتپ و … آمده اند تا ما را در بهینه سازی و خلق فرصتهای جدید یاری دهند نه صرفا بازتولید آنچه که از قبل می دانسته ایم.
زمان موردنیاز صحت سنجی و شبیه سازی نهایی
اگر شما مرحله “شبیه سازی طرح اولیه” را پشت سرگذاشته باشید در بدترین حالت این قسمت 2 تا 3 روز زمان خواهد برد.
بااین حال اگر تصور کنیم که از مرحله مذکور گذشته و این اولین برخورد شما با شبیه سازی می باشد و در آن می خواهید مقداری هم بهینه سازی با پیشنهادات نرم افزار انجام دهید؛ این مرحله 6 تا 8 روز از شما زمان خواهد گرفت.
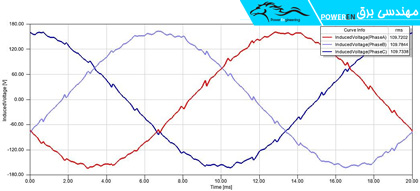
مسلما در این مرحله شما باید تمام خروجیهای ماشین (ولتاژ Back-EMF، گشتاور، تلفات، سرعت، ریپل گشتاور، گشتاور دندانه ای، ضریب توان و …) را بروی نمودارها ترسیم کنید و بر اساس آنها عملکرد طرحتان را ارزیابی نمایید.
پیشبینی زمان اتمام پروژه
با توجه به زمانهای موردنیازی که در هربخش گفته شد؛ انجام کامل یک طراحی به همراه بهینه سازی آن در بدترین حالت 129 روز و در بهترین حالت 75 روز به طول خواهد انجامید.
آموزش عملی طراحی ماشین الکتریکی
از آنجایی که “بزرگی سراسر به گفتار نیست، دو صد گفته چون نیم کردار نیست” اجازه بدهید به صورت عملی و با یکدیگر یک ماشین الکتریکی را طراحی نماییم، دقت داشته باشید که این قسمت تنها شامل مرحله دوم یعنی “استخراج معادلات بنیادی” بوده و دلیل انتخاب این مرحله نیز عدم آشنایی بیشتر مهندسین عزیز با این مرحله بخصوص می باشد.
تمام مواردی که در ادامه بیان می شود برگرفته از پایان نامه اینجانب بوده و شما می توانید چه با ذکر منبع و بدون آن، از دادههای بدست آمده در محاسبات، طراحیها و کارهای عملی خود استفاده نمایید، در آینده نیز پایان نامه مذکور به صورت کامل و رایگان در وب سایت در بخش پایاننامهها قرار خواهد گرفت.
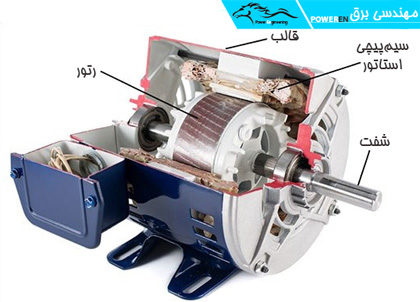
موتور الکتریکی ورنیر
موتوری که در این پست می خواهیم آن را طراحی نماییم، ورنیر – Vernier نام دارد. این موتور ویژگیهای بسیار جالبی در خود داشته و به صورت کلی در دسته ماشینهای الکتریکی نوپا قرار می گیرد.
ماشین ورنیر بدلیل دارا بودن توانایی ذاتی تولید گشتاور بالا در سرعتهای پایین بخوبی شناخته شده است. در این موتور برای اجتناب از افزایش تعداد جفت قطبهای سیمپیچی آرمیچر به منظور بهبود چگالی توان، از آهنرباهای دائمیسطحی به عنوان تامین کنندهی تحریک در ماشین رلوکتانسی ورنیر استفاده شده است. بدین ترتیب ماشین ورنیر رلوکتانسی به ماشین ورنیر آهنربای دائم (Vernier Permanent Magnet Machine) تبدیل میشود. اساس کار ماشینهای ورنیر بر پایهی استفاده از گیربکس مغناطیسی میباشد.
بزرگترین مزیت ماشین ورنیر، افزایش سرعت به صورت مجازی در درون آن با استفاده از گیربکس مغناطیسی می باشد، این افزایش مجازی باعث کاهش حجم، افزایش چگالی گشتاور و به صورت کلی بازده آن می گردد.
طراحی موتور ورنیر
دلیل استفاده از ساختار ماشین ورنیر بخاطر اثر دنده مغناطیسی آن میباشد که سبب میشود تا در سرعتهای پایین، گشتاور (توان) بالایی در موتور به وجود بیاید.
رابطهی اساسی که بین دندانههای استاتور و جفت قطبهای روی روتور وجود دارد، بصورت رابطهی (1-1) تعریف میشود:

(1-1)
در این رابطه Zr ، Zsو P بهترتیب تعداد جفت قطبهای روتور، تعداد دندانههای استاتور و تعداد جفت قطب ماشین میباشد. با توجه به ساختار روتور ورنیر و قرار گرفتن آهنرباها در کنار هم مانند شکل 1-2 و صرف نظر کردن از هارمونیکهای MMF در فاصلهی هوایی، میتوان MMF را به صورت رابطهی تقریبی (1-2) بیان کرد:[2]

(1-1)
در این رابطه ![]() زاویهی مکانیکی استاتور،
زاویهی مکانیکی استاتور، ![]() زاویهی موقعیت روتور و
زاویهی موقعیت روتور و ![]() دامنهی هارمونیک اصلی MMF ناشی از آهنربای دائم میباشد که به صورت رابطهی (1-3) تعریف میشود:
دامنهی هارمونیک اصلی MMF ناشی از آهنربای دائم میباشد که به صورت رابطهی (1-3) تعریف میشود:

(3-1)
بطوریکه در این رابطه، ![]() چگالی شار پسماند آهنربای دائم و
چگالی شار پسماند آهنربای دائم و ![]() اندازهی ارتفاع آهنربا و
اندازهی ارتفاع آهنربا و ![]() نفوذ پذیری مغناطیسی در آهنربا میباشد. همچنین همانطورکه در شکل 1-2 نشان داده شده است
نفوذ پذیری مغناطیسی در آهنربا میباشد. همچنین همانطورکه در شکل 1-2 نشان داده شده است ![]() فاصلهی بین دو آهنربا میباشد. استفاده از فاصله بین آهنرباها سبب میشود تا شار نشتی و مصرف آهنربا کاهش پیدا کند.
فاصلهی بین دو آهنربا میباشد. استفاده از فاصله بین آهنرباها سبب میشود تا شار نشتی و مصرف آهنربا کاهش پیدا کند.


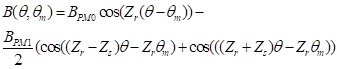
با توجه به شکل دندانههای استاتور میتوان پرمیانس فاصلهی هوایی بین استاتور و روتور را با در نظر گرفتن هارمونیکهای صفرو یکم بصورت رابطهی (1-4) تقریب زد:

(4-1)
در این رابطه ![]() مقدار متوسط پرمیانس و
مقدار متوسط پرمیانس و ![]() دامنهی هارمونیک اصلی تغییرات اندازهی پرمیانس در فاصلهی هوایی را نشان میدهد. با توجه به داشتن رابطهی MMF و پرمیانس در واحد سطح فاصلهی هوایی، میتوان چگالی شار فاصلهی هوایی را بصورت رابطهی تقریبی (1-5) تعریف کرد:
دامنهی هارمونیک اصلی تغییرات اندازهی پرمیانس در فاصلهی هوایی را نشان میدهد. با توجه به داشتن رابطهی MMF و پرمیانس در واحد سطح فاصلهی هوایی، میتوان چگالی شار فاصلهی هوایی را بصورت رابطهی تقریبی (1-5) تعریف کرد:

(5-1)
(6-1)
بطوری که پارامترهای ![]() و
و ![]() بصورت زیر تعریف میشوند:
بصورت زیر تعریف میشوند:

(7-1)

(8-1)
با استفاده از رابطهی چگالی شار فاصلهی هوایی میتوان شار پیوندی یک فاز را بصورت رابطهی (1-9) تعریف کرد:
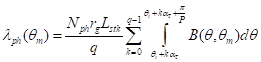
(9-1)
همچنین گام شیار استاتور عبارت است از:

(10-1)
در رابطهی (1-9)، ![]() ،
، ![]() و
و ![]() بهترتیب تعداد دور سیمپیچی هر فاز (به صورت سری)، طول موثر ماشین و متوسط شعاع فاصلهی هوایی بین استاتور و روتور بیرونی میباشد. همچنین
بهترتیب تعداد دور سیمپیچی هر فاز (به صورت سری)، طول موثر ماشین و متوسط شعاع فاصلهی هوایی بین استاتور و روتور بیرونی میباشد. همچنین ![]() تعداد شیارهای هر فاز زیر هر قطب میباشد. در رابطهی (1-9) موقعیت اولیهی سیمپیچی هرفاز با
تعداد شیارهای هر فاز زیر هر قطب میباشد. در رابطهی (1-9) موقعیت اولیهی سیمپیچی هرفاز با ![]() مشخص میشود. با جایگزین کردن رابطهی (1-6) در رابطهی (1-9)، رابطهی (1-11) بدست میآید.[2]
مشخص میشود. با جایگزین کردن رابطهی (1-6) در رابطهی (1-9)، رابطهی (1-11) بدست میآید.[2]
(11-1)
تمامی روابطی که تا این قسمت بیان شد بین ماشین ورنیر و ماشین سنکرون با روتور آهنربای دائم سطحی یکسان میباشد. در ماشین PMSM دو پارامتر Zr و P دارای یک مقدار میباشند. در این صورت با توجه به ساده سازی رابطهی (1-11)، رابطهی (1-12) بدست میآید.

(12-1)
در رابطهی (1-12)، پارامترهای ![]() و
و ![]() بهترتیب موقعیت زاویهی هر فاز استاتور و هارمونیک اصلی میباشند. بدلیل کوچک بودن دامنهی هارمونیکهای ناشی از دندانههای استاتور، از آنها در رابطه (1-12) صرف نظر شده است. با توجه به داشتن رابطهی (1-12) برای شار دور فاصلهی هوایی، میتوان ولتاژ القاء شده در ساختار PMSM را به صورت رابطهی (1-13) بیان کرد:
بهترتیب موقعیت زاویهی هر فاز استاتور و هارمونیک اصلی میباشند. بدلیل کوچک بودن دامنهی هارمونیکهای ناشی از دندانههای استاتور، از آنها در رابطه (1-12) صرف نظر شده است. با توجه به داشتن رابطهی (1-12) برای شار دور فاصلهی هوایی، میتوان ولتاژ القاء شده در ساختار PMSM را به صورت رابطهی (1-13) بیان کرد:
(13-1)
در رابطهی (1-13)، پارامتر ![]() متوسط اندازهی قطر فاصلهی هوایی بین استاتور و روتور میباشد. با توجه به اینکه در ساختار ماشین ورنیر از رابطهی (1-1) استفاده میشود، آنگاه رابطهی (1-12) به شکل رابطهی (1-14) بیان میشود:
متوسط اندازهی قطر فاصلهی هوایی بین استاتور و روتور میباشد. با توجه به اینکه در ساختار ماشین ورنیر از رابطهی (1-1) استفاده میشود، آنگاه رابطهی (1-12) به شکل رابطهی (1-14) بیان میشود:
(14-1)
با توجه بهاینکه در رابطهی (1-14)، از مولفهی هارمونیک شمارهی ![]() به دلیل کوچک بودن دامنهی آن صرف نظر شده، بنابراین از علامت تقریب در رابطه استفاده شده است.
به دلیل کوچک بودن دامنهی آن صرف نظر شده، بنابراین از علامت تقریب در رابطه استفاده شده است.
حال میتوان ولتاژ القائی در ساختار ورنیر را به صورت رابطهی (1-15) بیان کرد:

(15-1)

(16-1)
در این رابطه علامت مثبت برای حالت ![]() و علامت منفی برای حالت
و علامت منفی برای حالت ![]() است. برای اینکه ولتاژ القائی افزایش پیدا کند در طراحی ساختار ماشین از رابطهی
است. برای اینکه ولتاژ القائی افزایش پیدا کند در طراحی ساختار ماشین از رابطهی ![]() استفاده میشود. با آنالیز چگالی شار فاصلهی هوایی میتوان دامنهی
استفاده میشود. با آنالیز چگالی شار فاصلهی هوایی میتوان دامنهی ![]() و
و ![]() را بدست آورد. دامنهی
را بدست آورد. دامنهی ![]() نسبت به
نسبت به ![]() خیلی کوچکتر است اما بدلیل تاثیر ضریبی که در آن ضرب میشود نمیتوان از مقدار آن صرف نظر کرد. با توجه به مطالب فوق، ساختار ورنیر دارای دامنهی ولتاژ بالاتری نسبت به ساختار PMSM میباشد. هرچه نسبت
خیلی کوچکتر است اما بدلیل تاثیر ضریبی که در آن ضرب میشود نمیتوان از مقدار آن صرف نظر کرد. با توجه به مطالب فوق، ساختار ورنیر دارای دامنهی ولتاژ بالاتری نسبت به ساختار PMSM میباشد. هرچه نسبت ![]() بزرگتر انتخاب شود دامنهی ولتاژ خروجی ماشین نیز افزایش پیدا میکند، بنابراین بهتر است برای ساختار ورنیر از قطر بزرگ تری برای طراحی استفاده شود.
بزرگتر انتخاب شود دامنهی ولتاژ خروجی ماشین نیز افزایش پیدا میکند، بنابراین بهتر است برای ساختار ورنیر از قطر بزرگ تری برای طراحی استفاده شود.
رابطهی شمارهی (1-1) را میتوان بصورت رابطهی (1-17) نیز بیان کرد:

(17-1)
در این صورت با ترکیب دو رابطهی (1-16) و (1-17) دامنهی موثر ولتاژ القاء شده در سیمپیچی استاتور از رابطهی (1-18) بدست میآید:

(18-1)
با استفاده از رابطهی (1-12) میتوان دامنهی موثر ولتاژ القائی در ماشین PMSM را بصورت رابطهی (1-19) بیان نمود:

(19-1)
برای ساده سازی بیشتر میتوان ثابتهای رابطهی پرمیانس را با استفاده از روش Conformal Mapping (نگاشت همدیس) و ضریب کارتر بدست آورد:[3]
(20-1)

(21-1)
با توجه به شکل 1-3 و رابطهی (1-10)، ![]() برابر است با نسبت دهانهی شیار به گام شیار
برابر است با نسبت دهانهی شیار به گام شیار ![]() و همچنین پارامتر g برابر است با
و همچنین پارامتر g برابر است با ![]() که
که ![]() و
و ![]() بهترتیب ارتفاع آهنربا و فاصلهی هوایی بین روتور و استاتور میباشد.
بهترتیب ارتفاع آهنربا و فاصلهی هوایی بین روتور و استاتور میباشد.
با توجه به شکل 1-3 میتوان گام شیار ![]() را برابر
را برابر ![]() در نظر گرفت، در این صورت اندازهی دهانهی شیار
در نظر گرفت، در این صورت اندازهی دهانهی شیار ![]() از رابطهی (1-12) بدست میآید:
از رابطهی (1-12) بدست میآید:

(22-1)

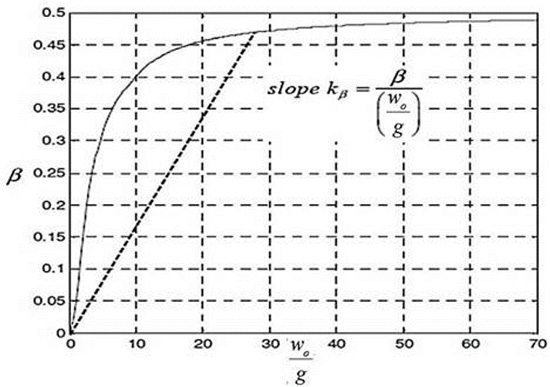
ضریب کارتر ![]() نیز تابعی غیر خطی بر حسب
نیز تابعی غیر خطی بر حسب ![]() است که در شکل 1-4 نشان داده شده است و از رابطهی (1-23) بدست میآید[3]
است که در شکل 1-4 نشان داده شده است و از رابطهی (1-23) بدست میآید[3]
(23-1)
البته میتوان با یک تقریب مناسب ضریب کارتر را بصورت رابطهی (1-14) نیز بیان کرد[2]

(24-1)
در رابطهی (1-14)، منحنی غیر خطی ![]() ، با شیب
، با شیب ![]() تقریب زده شده است تا روابط سادهتر شوند.
تقریب زده شده است تا روابط سادهتر شوند.
با توجه به ساده سازیهای انجام شده میتوان روابط (1-18) و (1-19) را به صورت زیر بازنویسی کرد:

(25-1)

(26-1)
(27-1)

(28-1)
با بررسی پارامتر ![]() در روابط بالا میتوان بهاین نتیجه رسید که دامنهی ضریب
در روابط بالا میتوان بهاین نتیجه رسید که دامنهی ضریب ![]() با افزایش مقدار
با افزایش مقدار ![]() کاهش پیدا میکند. از طرفی دامنهی ضریب
کاهش پیدا میکند. از طرفی دامنهی ضریب ![]() با افزایش مقدار
با افزایش مقدار ![]() ابتدا افزایش و سپس کاهش پیدا میکند. برای بدست آوردن مقدار بهینهی پارامتر
ابتدا افزایش و سپس کاهش پیدا میکند. برای بدست آوردن مقدار بهینهی پارامتر ![]() برای داشتن بیشترین مقدار
برای داشتن بیشترین مقدار ![]() ، میتوان از رابطهی (1-18) نسبت به پارامتر
، میتوان از رابطهی (1-18) نسبت به پارامتر ![]() مشتق گرفت. معمولا مقدار بهینهی پارامتر
مشتق گرفت. معمولا مقدار بهینهی پارامتر ![]() در بازدهای بین 5/0 تا 6/0 است. با توجه به روابط (1-15) و (1-16)، نسبت ولتاژ القاء شده در ساختار ورنیر و ساختار PMSM برابر است با:[4]
در بازدهای بین 5/0 تا 6/0 است. با توجه به روابط (1-15) و (1-16)، نسبت ولتاژ القاء شده در ساختار ورنیر و ساختار PMSM برابر است با:[4]
(29-1)
از این پارامتر در ادامه برای بررسی ضریب قدرت ساختار ورنیر استفاده میشود.
حال میتوان توان خروجی استاتور را با استفاده از رابطهی (1-30) بدست آورد:

(30-1)
اگر بارگذاری الکتریکی مخصوص بصورت رابطهی (1-31) در نظر گرفته شود:[5]
(31-1)
آنگاه با ترکیب رابطهی (1-30) و (1-31) میتوان به رابطهی (1-32) رسید:

(32-1)
(33-1)
تعداد دندانههای استاتور و تعداد جفت قطبهای روی روتور از جمله مهمترین پارامترهایی هستند که در کاهش دامنهی ریپل گشتاور ورودی ساختار ورنیر تاثیر چشمگیری میگذارند. در ساختار ورنیر انتخاب بالای تعداد دندانههای استاتور سبب کاهش ضریب قدرت ماشین میشود که در ادامه به بررسی آن پرداخته میشود. معمولا پارامتر ![]() را برابر 2 یا 3 در نظر میگیرند تا هم دامنهی ضریب
را برابر 2 یا 3 در نظر میگیرند تا هم دامنهی ضریب ![]() که رابطهی مسقیمی با مقدار
که رابطهی مسقیمی با مقدار ![]() دارد، بزرگ انتخاب شود و هم ضریب قدرت کاهش چشمگیری نداشته باشد.[6]
دارد، بزرگ انتخاب شود و هم ضریب قدرت کاهش چشمگیری نداشته باشد.[6]
همچنین در این ماشین، تعداد جفت قطب آهنربای دائم روی روتور بهاندازهی سرعت روتور ![]() و فرکانس ماشین
و فرکانس ماشین ![]() بستگی دارد و از رابطهی (1-34) بدست میآید:
بستگی دارد و از رابطهی (1-34) بدست میآید:

(34-1)
همانطور که قبلا بیان شد دامنهی ![]() نسبت به
نسبت به ![]() خیلی کوچک است. بنابراین برای اینکه تاثیر بیشتری در تولید توان ماشین داشته باشد نیاز است تا نسبت
خیلی کوچک است. بنابراین برای اینکه تاثیر بیشتری در تولید توان ماشین داشته باشد نیاز است تا نسبت ![]() بزرگ انتخاب شود. اگر مقدار نسبت
بزرگ انتخاب شود. اگر مقدار نسبت ![]() خیلی بزرگ انتخاب شود ولتاژ القاء شده در سیمپیچی استاتور افزایش پیدا کرده اما ضریب قدرت ماشین بشدت افت پیدا میکند. همچنین اگر مقدار نسبت
خیلی بزرگ انتخاب شود ولتاژ القاء شده در سیمپیچی استاتور افزایش پیدا کرده اما ضریب قدرت ماشین بشدت افت پیدا میکند. همچنین اگر مقدار نسبت ![]() کوچک انتخاب شود دامنهی ولتاژ القائی سیمپیچی استاتور کاهش پیدا کرده اما ضریب قدرت افزایش پیدا میکند. بنابراین باید یک مصالحهای بین ولتاژ القائی (گشتاور) و ضریب قدرت ماشین در نظر گرفت تا هم ضریب قدرت مقداری معقول داشته باشد و هم ولتاژ القائی خروجی ماشین، افت چشمگیری نداشته باشد.[7]
کوچک انتخاب شود دامنهی ولتاژ القائی سیمپیچی استاتور کاهش پیدا کرده اما ضریب قدرت افزایش پیدا میکند. بنابراین باید یک مصالحهای بین ولتاژ القائی (گشتاور) و ضریب قدرت ماشین در نظر گرفت تا هم ضریب قدرت مقداری معقول داشته باشد و هم ولتاژ القائی خروجی ماشین، افت چشمگیری نداشته باشد.[7]
با توجه به در نظر گرفتن تمامیشرایطی که برای انتخاب تعداد دندانههای استاتور و تعداد جفت قطبهای روتور ذکر شد، باید این دو پارامتر طوری انتخاب شوند تا کوچکترین مضرب مشترک این دو پارامتر، عددی بزرگ شود. زیرا ریپل گشتاور با مقدار کوچکترین مضرب مشترک دو پارامتر تعداد دندانههای استاتور و تعداد قطبهای روتور رابطهای معکوس دارد. بنابراین هر چهاین مضرب مشترک، بزرگتر انتخاب شود ریپل گشتاور کوچکتر شده و خروجی ماشین مطلوبتر خواهد شد.
حال با فرض انتخاب مناسب پارامترهای ![]() ،
، ![]() و
و ![]() میتوان رابطهی توان خروجی ماشین را بصورت رابطهی (1-35) بازنویسی کرد تا با استفاده از این رابطه، بهانتخاب مناسب پارامترهای دیگر ماشین پرداخته شود
میتوان رابطهی توان خروجی ماشین را بصورت رابطهی (1-35) بازنویسی کرد تا با استفاده از این رابطه، بهانتخاب مناسب پارامترهای دیگر ماشین پرداخته شود
(35-1)

(36-1)
با ثابت در نظر گرفتن پارامترهای ![]() ،
، ![]() و
و ![]() ، ضریب
، ضریب ![]() مقداری ثابت خواهد داشت. بنابراین توان خروجی ماشین با قطر فاصلهی هوایی رابطهی مستقیم و با اندازهی فاصلهی هوایی رابطهی معکوس دارد. هرچه قطر ماشین بزرگتر انتخاب شود و فاصلهی هوایی کوچکتر شود توان خروجی ماشین بالاتر میرود. البته انتخاب فاصلهی هوایی تحت تاثیر محدودیتهای مکانیکی میباشد و نمیتوان از یک مقدار مشخصی کوچکتر در نظر گرفت.
مقداری ثابت خواهد داشت. بنابراین توان خروجی ماشین با قطر فاصلهی هوایی رابطهی مستقیم و با اندازهی فاصلهی هوایی رابطهی معکوس دارد. هرچه قطر ماشین بزرگتر انتخاب شود و فاصلهی هوایی کوچکتر شود توان خروجی ماشین بالاتر میرود. البته انتخاب فاصلهی هوایی تحت تاثیر محدودیتهای مکانیکی میباشد و نمیتوان از یک مقدار مشخصی کوچکتر در نظر گرفت.
با توجه بهاینکه فرکانس برق شبکه و فرکانس ولتاژ مورد استفادهی وسایل برقی برابر 50 هرتز است، بنابراین فرکانس ولتاژ ورودی موتور، برابر 50 هرتز در نظر گرفته میشود. همچنین دامنهی موثر ولتاژ هر فاز سیمپیچی استاتور برابر 220 ولت در نظر گرفته میشود تا در سرعتهای پایین برای یک توان ثابت، ابعاد ماشین از یک حد مشخصی بزرگتر نشود.[8]
انتخاب مناسب تعداد جفت قطبهای روتور و تعداد شیارهای استاتور باعث کاهش ریپل گشتاور میشود. بهمنظور داشتن ریپل گشتاور کمتر بایستی تعداد دندانههای استاتور و تعداد جفت قطبهای روتور، طوری انتخاب شوند تا کوچکترین مضرب مشترک این دو پارامتر، عددی بزرگ شود. محدودیت بعدی که باید برای انتخاب تعداد جفت قطبهای روتور لحاظ کرد سرعت موتور میباشد که در این پروژه کاربردهای خاص با سرعت پایین، سرعت روتور، کمتر از 200 دور در دقیقه در نظر گرفته میشود. بنابراین برای فرکانس 50 هرتز، تعداد جفت قطبهای روتور باید بزرگتر و یا مساوی 15 در نظر گرفته شود. با توجه به بررسیهای انجام شده در مقالات، ![]() برابر 2 یا 3 در نظر گرفته میشود تا ضریب قدرت ماشین افت چشمگیری نداشته باشد. اگر
برابر 2 یا 3 در نظر گرفته میشود تا ضریب قدرت ماشین افت چشمگیری نداشته باشد. اگر ![]() برابر 2 انتخاب و از 4 قطب برای سیمپیچی استاتور استفاده شود آنگاه تعداد شیارهای استاتور برابر 24 خواهد شد. بنابراین با توجه به روابط (1-1) و (1-34) میتوان پارامترهای اساسی ماشین را بصورت روابط (1-37) و (1-38) تعریف کرد تا تمامی محدودیتها در آن لحاظ شود:
برابر 2 انتخاب و از 4 قطب برای سیمپیچی استاتور استفاده شود آنگاه تعداد شیارهای استاتور برابر 24 خواهد شد. بنابراین با توجه به روابط (1-1) و (1-34) میتوان پارامترهای اساسی ماشین را بصورت روابط (1-37) و (1-38) تعریف کرد تا تمامی محدودیتها در آن لحاظ شود:

(37-1)
(38-1)
در این رابطه ![]() فرکانس موتور و
فرکانس موتور و ![]() سرعت خروجی روتور میباشد. با توجه به مقادیر بدست آمده برای تعداد دندانههای استاتور و تعداد جفت قطبهای روتور، کوچکترین مضرب مشترک این دو پارامتر از رابطهی (1-39) بدست میآید:
سرعت خروجی روتور میباشد. با توجه به مقادیر بدست آمده برای تعداد دندانههای استاتور و تعداد جفت قطبهای روتور، کوچکترین مضرب مشترک این دو پارامتر از رابطهی (1-39) بدست میآید:

(39-1)
پارامتر دیگری که در ساختار ورنیر مورد بررسی قرار میگیرد نسبت جفت قطب روتور به جفت قطب استاتور میباشد. این نسبت با رابطهی (1-40) تعریف میشود. این نسبت با توجه به مقادیر بدست آمده برای پارامترهای این ماشین برابر 11 است که با توجه به این مرجع[9] عددی مطلوب میباشد. زیرا هدف از انتخاب این نسبت، داشتن ضریب قدرت مناسب میباشد.

(40-1)
بعد از بررسی مشخصات کلی موتور، نوبت به بررسی محدودیتهای مکانیکی آن میرسد. ساختار انتخاب شده برای موارد خاص میباشد که در آنها حجم موتور بسیار حائز اهمیت است به همین دلیل محدودیت مکانیکی آن، مربوط به قطر خارجی روتور میباشد. یکی از مزیتهای ماشین ورنیر امکان کار به صورت اتصال مستقیم میباشد به همین دلیل اجازه داده میشود بار به صورت مستقیم به موتور وصل شود، همانگونه که مشخص است تفاوت ذاتی میان یک موتور و ژنراتور در میان نیست به همین دلیل ابعاد ماشین را به گونهای درنظر گرفته میشود که امکان استفاده به عنوان یک ژنراتور 1kw در توربینهای بادی کوچک را نیز داشته باشد (کاربرد ماشینهای الکتریکی برای خودرهای الکتریکی نیز به گونهای است که ماشین مذکور امکان بهره وری به صورت ژنراتوری را نیز فراهم نماید.). با توجه به توضیحات ارائه شده اندازهی قطر خارجی آن برابر 230 میلی متر در نظر گرفته میشود.[10] در ادامه به بررسی مشخصات طراحی هرکدام از بخشهای موتور پرداخته میشود.
طراحی روتور
با توجه به محدودیتهای مکانیکی بیان شده، قطر داخلی روتور برابر 200 میلی متر و اندازهی فاصلهی هوایی برابر 0.5 میلی متر در نظر گرفته میشود. ازآنجاییکه اندازهی ضخامت آهنرباهای دائمی برای ساختارهای سطحی 5 برابر اندازهی فاصلهی هوایی انتخاب میشود[11] بنابراین میتوان ضخامت آهنرباهای دائمی استفاده شده در ساختار روتور را برابر 2.5 میلی متر در نظر گرفت.
از آنجائیکه تعداد قطب روتور برابر 44 میباشد، میتوان گام قطب را بصورت تقریبی از رابطهی (1-41) بدست آورد. معمولا بهمنظور کاهش شار نشتی بین آهنرباها و کاهش آهنربای مصرفی در موتور، ضریب قوس قطب به گام قطب آهنربا ![]() عددی بین 0.6 تا 0.8 انتخاب میشود [8]، اگر قوس قطب به گام قطب در این ساختار برابر 0.75 انتخاب شود، آنگاه اندازهی عرض آهنربا و ارتفاع یوغ بهترتیب از روابط (1-42) و (1-43) بدست میآید.
عددی بین 0.6 تا 0.8 انتخاب میشود [8]، اگر قوس قطب به گام قطب در این ساختار برابر 0.75 انتخاب شود، آنگاه اندازهی عرض آهنربا و ارتفاع یوغ بهترتیب از روابط (1-42) و (1-43) بدست میآید.

(41-1)

(42-1)

(43-1)
پارامترهای ![]() ،
، ![]() ،
، ![]() ،
، ![]() ،
، ![]() و
و ![]() بهترتیب معرف اندازهی قطر داخلی روتور، اندازهی عرض آهنربای روتور، اندازهی ارتفاع آهنربای روتور، اندازهی ارتفاع یوغ روتور، اندازهی گام قطب روتور و ضریب موثر قوس قطب میباشند. در ادامه به بررسی ساختار و ابعاد استاتور پرداخته میشود.
بهترتیب معرف اندازهی قطر داخلی روتور، اندازهی عرض آهنربای روتور، اندازهی ارتفاع آهنربای روتور، اندازهی ارتفاع یوغ روتور، اندازهی گام قطب روتور و ضریب موثر قوس قطب میباشند. در ادامه به بررسی ساختار و ابعاد استاتور پرداخته میشود.
طراحی استاتور
ساختار استاتور در این پروژه شامل 24 دندانه و شیار میباشد. با توجه به مرجع [9] پارامتر عرض دهانهی شیار به گام شیار (پارامتر ![]() ) برابر 0.6 انتخاب میشود تا بصورت همزمان ضریب قدرت و گشتاور، دارای مقادیر مطلوبی باشند. بنابراین با توجه به اندازهی قطر خارجی استاتور، میتوان اندازهی گام شیار و عرض شیار استاتور را بهترتیب از روابط (1-44) و (1-45) بدست آورد.
) برابر 0.6 انتخاب میشود تا بصورت همزمان ضریب قدرت و گشتاور، دارای مقادیر مطلوبی باشند. بنابراین با توجه به اندازهی قطر خارجی استاتور، میتوان اندازهی گام شیار و عرض شیار استاتور را بهترتیب از روابط (1-44) و (1-45) بدست آورد.
(44-1)


(45-1)
پارامترهای ![]() و
و ![]() ،
، ![]() ،
، ![]() و
و ![]() بهترتیب معرف اندازهی قطر خارجی استاتور، اندازهی فاصلهی هوایی موتور، اندازهی عرض شیار استاتور، اندازهی گام شیار استاتور و نسبت عرض دهانهی شیار به گام شیار استاتور میباشند.
بهترتیب معرف اندازهی قطر خارجی استاتور، اندازهی فاصلهی هوایی موتور، اندازهی عرض شیار استاتور، اندازهی گام شیار استاتور و نسبت عرض دهانهی شیار به گام شیار استاتور میباشند.
بهمنظور محاسبهی اندازهی ارتفاع دندانههای استاتور، ابتدا باید تعداد دور سیمپیچی هر کدام از شیارهای استاتور و سطح مقطع سیمپیچی استاتور محاسبه شود. با توجه به مشخص بودن دامنهی ولتاژ هر کدام از فازها، میتوان پارامتر تعداد دور سیمپیچی هر فاز استاتور را با استفاده از رابطهی ولتاژ القائی، بصورت رابطهی (1-46) تعریف کرد.

(46-1)
بنابراین ابتدا باید پارامترهای مجهول تخمین زده شوند تا تعداد دور هر کدام از فازها محاسبه شود.
اولین پارامتری که بهمنظور تخمین تعداد دور سیمپیچی هر فاز استاتور مورد بررسی قرار میگیرد، پارامتر ![]() ناشی از آهنرباهای روی روتور میباشد. هارمونیک اصلی نیرومحرکهی مغناطیسی ناشی از آهنربا را میتوان با استفاده از رابطهی (1-47) تقریب زد:
ناشی از آهنرباهای روی روتور میباشد. هارمونیک اصلی نیرومحرکهی مغناطیسی ناشی از آهنربا را میتوان با استفاده از رابطهی (1-47) تقریب زد:

(47-1)

(48-1)
(49-1)

(50-1)

(51-1)

(52-1)
بطوریکه در رابطهی (1-49)، ![]() حداکثر چگالی شار نقطهی کار فاصلهی هوایی در حالت بی باری میباشد که برابر 1 تسلا فرض شده است. همچنین همانطورکه قبلا بیان شد، پارامتر
حداکثر چگالی شار نقطهی کار فاصلهی هوایی در حالت بی باری میباشد که برابر 1 تسلا فرض شده است. همچنین همانطورکه قبلا بیان شد، پارامتر ![]() فاصلهی بین دو آهنربا میباشد و استفاده از آن سبب میشود تا شار نشتی و مصرف آهنربا کاهش پیدا کند.
فاصلهی بین دو آهنربا میباشد و استفاده از آن سبب میشود تا شار نشتی و مصرف آهنربا کاهش پیدا کند.
دومین و سومین پارامتری که بهمنظور تخمین تعداد دور سیمپیچی هر فاز استاتور مورد بررسی قرار میگیرند، پارامترهای ثابت پرمیانس فاصلهی هوایی هستند که از روابط (1-54) و (1-55) بدست میآیند.
(53-1)


(54-1)


(55-1)
چهارمین پارامتری که بهمنظور تخمین تعداد دور سیمپیچی هر فاز استاتور مورد بررسی قرار میگیرد، پارامتر ضریب سیمپیچی استاتور میباشد. بطور کلی ضریب سیمپیچی استاتور تابع سه مولفه میباشد.
مولفهی اول مربوط به ضریب توزیع سیمپیچی استاتور ![]() بوده و از رابطهی (1-56) محاسبه میشود[5]
بوده و از رابطهی (1-56) محاسبه میشود[5]
(56-1)
پارامترهای ![]() ،
، ![]() و
و ![]() بهترتیب معرف تعداد شیارهای زیر هر قطب برای هرفاز استاتور، زاویهی الکتریکی گام شیار استاتور و شمارهی هارمونیک تابع اصلی میباشند.
بهترتیب معرف تعداد شیارهای زیر هر قطب برای هرفاز استاتور، زاویهی الکتریکی گام شیار استاتور و شمارهی هارمونیک تابع اصلی میباشند.
مولفهی دوم مربوط به ضریب گام سیمپیچی ![]() میباشد و از رابطهی (1-57) محاسبه میشود.
میباشد و از رابطهی (1-57) محاسبه میشود.

(57-1)
پارامتر ![]() معرف زاویهی الکتریکی گام سیمپیچی استاتور میباشد، که اندازهی زاویهی آن برابر 150 درجهی الکتریکی است.
معرف زاویهی الکتریکی گام سیمپیچی استاتور میباشد، که اندازهی زاویهی آن برابر 150 درجهی الکتریکی است.
مولفهی سوم مربوط به ضریب مورب کردن شیار استاتور یا آهنربا میباشد. از آنجایی که در این موتور از هیچ شیار موربی استفاده نشده است و آهنرباها بصورت مستقیم بر روی روتور قرار گرفتهاند، دامنهی این ضریب طبق رابطهی (1-58) برابر 1 میباشد.[12]

(58-1)
پارامتر ![]() معرف زاویهی مورب کردن شیار استاتور میباشد. حال میتوان ضریب سیمپیچی استاتور
معرف زاویهی مورب کردن شیار استاتور میباشد. حال میتوان ضریب سیمپیچی استاتور ![]() را از رابطهی (1-59) بدست آورد.
را از رابطهی (1-59) بدست آورد.

(59-1)
حال اگر فرض شود طول موثر موتور برابر 50 میلی متر باشد، در اینصورت تعداد دور سیمپیچی هر فاز استاتور از رابطهی (1-60) محاسبه میشود.

(60-1)

بعد از بررسی تعداد دور در هر فاز، نوبت به بررسی اندازهی سطح مقطع سیم استاتور در هر فاز میرسد. بهمنظور بررسی اندازهی سطح مقطع استاتور، ابتدا باید دامنهی جریان هرفاز مشخص شود. برهمین اساس با توجه به مشخص بودن دامنهی توان و ولتاژ، و بار نامی، میتوان دامنهی جریان موتور را از رابطهی (1-61) بدست آورد.
همانگونه که از رابطه (1-61) مشخص است برای بدست آوردن جریان هرفاز نیازمند تعیین ضریب توان میباشیم. یکی از مشکلاتی که ماشین ورنیر به صورت کلی با آن روبه روست داشتن ضریب توان پایین میباشد.[13] برای بهبود ضریب توان میتوان از راههای مشخص شدهای مانند؛ کاهش بارگذاری الکتریکی و یا تنظیم زاویه جریان استفاده کرد که هر کدام مشکلات خاص خود را دارد، روش دیگر استفاده از هالباخ میباشد که در طی تغییر در ساختار موتور شاهد بهبود ضریب توان خواهیم بود، البته در کنار این افزایش گشتاور خروجی به میزان قابل توجهی کاهش مییابد.[14] یکی از بهترین روشها برای بهبود ضریب توان استفاده از ساختار دو استاتور و ساختار Spoke میباشد. که در حال حاضر یکی از بهترین روشهای بهبود ضریب توان محسوب میگردد. در ادامه برای محاسبات، ضریب توان را 66/0 در نظر میگیریم.[15]


(61-1)
پارامترهای ![]() ،
، ![]() ،
، ![]() ،
، ![]() ،
، ![]() و
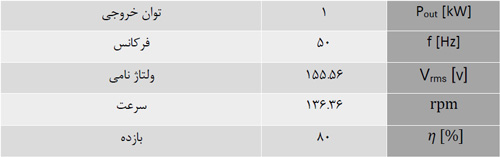
و ![]() بهترتیب معرف متوسط توان ورودی موتور، متوسط توان خروجی موتور، اندازهی دامنهی موثر ولتاژ هر کدام از فازها، اندازهی دامنهی موثر جریان هر کدام از فازها، ضریب توان و راندمان موتور میباشند. با توجه به مشخصات موتور ورنیر، توان خروجی موتور برابر 1000 وات و راندمان آن برابر 80 درصد فرض شده است. همچنین در رابطه (1-61) ضریب قدرت
بهترتیب معرف متوسط توان ورودی موتور، متوسط توان خروجی موتور، اندازهی دامنهی موثر ولتاژ هر کدام از فازها، اندازهی دامنهی موثر جریان هر کدام از فازها، ضریب توان و راندمان موتور میباشند. با توجه به مشخصات موتور ورنیر، توان خروجی موتور برابر 1000 وات و راندمان آن برابر 80 درصد فرض شده است. همچنین در رابطه (1-61) ضریب قدرت ![]() برابر 66/0 در نظر گرفته شده است.
برابر 66/0 در نظر گرفته شده است.
با توجه به مشخص بودن دامنهی جریان ورودی هر کدام از فازها و با فرض چگالی جریان 6 آمپر بر میلیمتر مربع برای سیمپیچی هرکدام از فازها، میتوان سطح مقطع و قطر سیم را بهترتیب از روابط (1-62) و (1-63) تخمین زد.

(62-1)

(63-1)
پارامترهای ![]() ،
، ![]() و
و ![]() بهترتیب معرف چگالی جریان سیمپیچی هر فاز موتور، سطح مقطع هر سیم و اندازهی قطر سیمپیچی هر کدام از فازها میباشند.
بهترتیب معرف چگالی جریان سیمپیچی هر فاز موتور، سطح مقطع هر سیم و اندازهی قطر سیمپیچی هر کدام از فازها میباشند.
شکل 5-1 نحوهی سیمپیچی استاتور را نشان میدهد. همانطور که در شکل 1-5 مشاهده میشود، سیمپیچی هر کدام از فازهای استاتور دارای یک رنگ مجزا میباشند و هرکدام از فازها با 120 درجه اختلاف فاز الکتریکی نسبت به یکدیگر بصورت چهار قطبی سیمپیچی شدهاند.

با توجه به نحوهی سیمپیچی استاتور که در شکل 1-5 نشان داده شده است، تعداد دور مربوط به بازوی کلاف داخل هر شیار برابر 192 دور میباشد. البته این تعداد دور مربوط به حالت بی باری است و بصورت تقریبی تخمین زده شده است و تعداد دور هرفاز بصورت دقیق از روی شبیه سازی و بهینهسازی موتور بدست میآید. اگر پرشدگی شیار استاتور جهت رعایت موارد ایمنی از دید جلوگیری از ازدیاد حرارت طبق سایر مقالات ارائه شده برابر 40 درصد در نظر گرفته شود، در این صورت مساحت مورد نیاز برای هر شیار از رابطهی (1-64) بدست میآید.

(64-1)

(65-1)

(66-1)
در روابط فوق پارامترهای ![]() ،
، ![]() ،
، ![]() و
و ![]() بهترتیب تعداد هادیهای داخل هر شیار استاتور، مساحت هر شیار استاتور، سطح مقطع سیم و ضریب پرشدگی شیار استاتور میباشند. شکل 1-6 پارامترهای مربوط به شیار استاتور را نشان میدهد. با توجه به شکل 1-5 دامنهی پارامترهای استاتور باید طوری انتخاب شوند تا سطح مقطع بدست آمده از رابطهی (1-64) برای هر شیار رعایت شود.
بهترتیب تعداد هادیهای داخل هر شیار استاتور، مساحت هر شیار استاتور، سطح مقطع سیم و ضریب پرشدگی شیار استاتور میباشند. شکل 1-6 پارامترهای مربوط به شیار استاتور را نشان میدهد. با توجه به شکل 1-5 دامنهی پارامترهای استاتور باید طوری انتخاب شوند تا سطح مقطع بدست آمده از رابطهی (1-64) برای هر شیار رعایت شود.
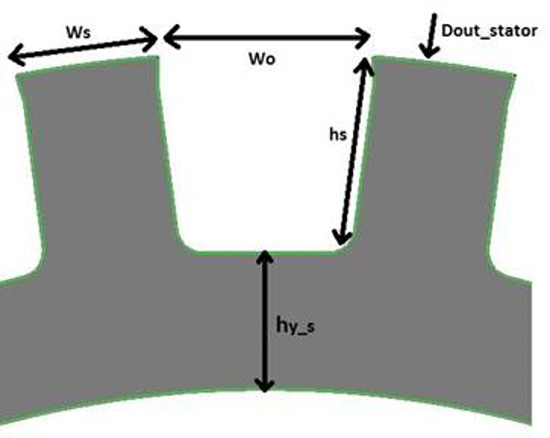
بنابراین میتوان اندازهی عمق شیار استاتور را از رابطهی (1-67) محاسبه کرد.


(67-1)
بعد از تخمین اندازهی ارتفاع شیار استاتور نوبت به بررسی و محاسبهی ارتفاع یوغ استاتور میرسد. معمولا در ماشینهای ورنیر، اندازهی ارتفاع یوغ استاتور برابر اندازهی عرض دندانهی استاتور در نظر گرفته میشود، بنابراین اندازهی ارتفاع یوغ استاتور برابر 15.96 میلی متر در نظر گرفته میشود. با توجه به مشخص بودن ارتفاع شیار و ارتفاع یوغ استاتور، میتوان قطر داخلی استاتور را از رابطهی (1-68) محاسبه کرد.

(68-1)
در رابطهی (1-68) پارامترهای ![]() ،
، ![]() و
و ![]() بهترتیب معرف قطر داخلی استاتور، ارتفاع یوغ استاتور و ارتفاع شیار استاتور میباشند. حال با توجه به مشخص شدن تمامی ابعاد اولیهی موتور، نوبت به پیاده سازی آن و بررسی صحت طراحی اولیه میرسد.
بهترتیب معرف قطر داخلی استاتور، ارتفاع یوغ استاتور و ارتفاع شیار استاتور میباشند. حال با توجه به مشخص شدن تمامی ابعاد اولیهی موتور، نوبت به پیاده سازی آن و بررسی صحت طراحی اولیه میرسد.
در ادامه جدول 1-1 و 1-2 بیانگر تمام مشخصات موتور ورنیر طراحی شده است

شبیه سازی ژنراتور شار محور در مکسول
در این بخش می خواهیم استاتور ژنراتور شار محور دو رتور – یک استاتور (شیاردار) را با استفاده از نرم افزار Ansys Maxwell شبیه سازی نماییم، در این ویدیو کوتاه نگاهی هم به بخش RMxprt در مکسول خواهیم داشت که سبب سادگی بیشتر در طراحی شده است
دانلود فیلم آموزش شبیه سازی ژنراتور شار محور در مکسول – Full HD | با حجم 224 مگابايت
آنچه که در این ویدیو خواهید دید؛
کار با RMxprt، تبدیل هسته رتور به استاتور، نحوه منفصل سازی هسته ها، توضیح حالت دبل لیر و دو طبقه، استفاده از DiskSlotCore، کار بروی استاتور، توضیح Wedge و تاثیر آن بر طراحی، ترسیم سیم پیچ در محیط دو بعدی، انتقال شکل به سه بعدی و تبدیل به سیم پیچ، بیان مشکلات عادی این مسیر، نحوه اندازه گیری برای سیم پیچ های مقالات، ترسیم سیم پیچ با ابعاد دقیق، محاسبه ابعاد دقیق سیم پیچ و زاویه ها، ترسیم سیم پیچ در محیط سه بعدی، تبدیل خط به صفحه، تبدیل صفحه به شکل سه بعدی.
مروری بر مراحل طراحی موتور الکتریکی
چگونه می توان یک موتور الکتریکی را طراحی کرد؟
زمان کل: 80 روز
مشخص کردن اهداف کلی
هدف از طراحی ماشین چیست؟ قطعا ساخت موتور برای خودرو برقی با طراحی موتور برای پمپاژ چاه آب متفاوت می باشد، در این قسمت مواردی مانند نوع موتور، کاربرد مدنظر، توان ماشین، سرعت ماشین، ولتاژ کاری، فرکانس کاری، ابعاد کلی ماشین، بودجه مالی و … تعیین می گردند.
استخراج معادلات بنیادی
در این مرحله باید تمام معادلات بنیادی ماشین مذکور بر اساس منابع (کتاب ها، مقالات و …) استخراج شوند، پس از استخراج از این معادلات جهت انجام سایر مجهولات مانند؛ جریان ماشین، سطح مقع سیم، تعداد دور سیم پیچی، تعداد قطب ها، تعداد دندانه و … استفاده می نماییم.
انجام محاسبات، طراحی اولیه
در مرحله سوم باید تمام داده های طراحی ماشین نظیر؛ قطر داخلی، قطر خارجی، طول ماشین، فاصله هوایی، گشتاور خروجی، نوع سیم پیچی، چگالی میدان مغناطیسی فاصله هوایی، نوع رتور و … مشخص شده باشد، این ماشین به عنوان یک ماشین اولیه و بهینه نشده درنظر گرفته می شود.
انتخاب روش و سپس بهینهسازی
در مرحله چهارم با توجه به طراحی و محدودیت های آن از میان روشهای موجود بهینه سازی یک روش انتخاب می شود، در نهایت با انتخاب مناسب پارامترها اقدام به بهینه سازی می نماییم.
صحتسنجی و شبیه سازی طرح
در مرحله پایانی ماشین بهینه سازی شده را با یکی از نرم افزارهای المان محدود به صورت دوبعدی یا سهبعدی شبیه سازی می نماییم تا از عملکرد صحیح آن اطمینان حاصل نماییم، دقت داشته باشید شبیه سازی صرفا برای صحتسنجی می باشد نه بهینهسازی.
منابع
- کتاب مردی که قرن 20 را اختراع کرد، نویسنده سن پاتریک ↑
- Kim, Byungtaek, and Thomas A. Lipo. “Operation and design principles of a PM Vernier motor”, IEEE Transactions on Industry Applications vol.50 no.6 pp.3656-3663, 2014. ↑
- Zhu, Z. Q., and David Howe, “Instantaneous magnetic field distribution in brushless permanent magnet DC motors. III. Effect of stator slotting”, IEEE Transactions on Magnetics vol.29 no.1 pp.143-151, 1993. ↑
- Zhu, Li, et al, “Analytical methods for minimizing cogging torque in permanent-magnet machines”, IEEE Transactions on Magnetics vol.45 no.4 pp. 2023-2031, 2009. ↑
- Islam, Rakib, et al. “Permanent-magnet synchronous motor magnet designs with skewing for torque ripple and cogging torque reduction”, IEEE Transactions on Industry Applications vol.45 no.1 pp.152-160, 2009. ↑
- Hwang, Sang-Moon, et al, “Cogging torque and acoustic noise reduction in permanent magnet motors by teeth pairing”, IEEE Transactions on Magnetics, Vol.36 no.5 pp.3144-3146, 2000. ↑
- Zhu, Z. Q., and David Howe, “Influence of design parameters on cogging torque in permanent magnet machines”, IEEE Transactions on Energy Conversion vol15 no.4 pp.407-412, 2000. ↑
- Wu, Leilei, et al, “Influence of Pole Ratio and Winding Pole Numbers on Performance and Optimal Design Parameters of Surface Permanent-Magnet Vernier Machines”, IEEE Transactions on Industry Applications, vol.51 no.5 pp. 3707-3715, 2015. ↑
- Li, Dawei, et al, “Design Procedure of Dual-Stator Spoke-Array Vernier Permanent-Magnet Machines”, IEEE Transactions on Industry Applications vol51 no.4 pp. 2972-2983, 2015. ↑
- Li, Jiangui, et al, “A new efficient permanent-magnet Vernier machine for wind power generation” IEEE Transactions on Magnetics vol.46 no.6 pp.1475-1478, 2010. ↑
- Kim, Byungtaek, and Thomas A. Lipo, “Operation and design principles of a PM Vernier motor,” IEEE Energy Conversion Congress and Exposition, 2013. ↑
- Krishnan, Ramu, “Permanent magnet synchronous and brushless DC motor drives”, CRC press, 2009. ↑
- E. Spooner and L. Hardock, “Vernier hybrid machines”, Electric Power Appl, vol.150 no.6, pp.655–662, Nov.2003. ↑
- Dawei Li, Ronghai Qu, Thomas Lipo, “High Power Factor Vernier Permanent Magnet Machines”, IEEE Transactions on Industry Applications vol.50 no.6 pp.3664 – 3674, 2014. ↑
- Y. Kataoka, M. Takayama, Y. Matsushima, and Y. Anazawa. “Comparison of three magnet array-type rotors in surface permanent magnet-type Vernier motor”, Conf. Electrical Machines and systems, 2012. ↑
در پایان امیدواریم که از این آموزش استفاده لازم را برده باشید و اگر نکته و یا تجربهای در این زمینه دارید خوشحال می شویم آن را در قسمت نظرات با ما در میان بگذارید.
راستی! برای دريافت مطالب جديد در پیج اینستاگرم PowreEn عضو شويد.








سلام مهندس جان
معادلات بنیادی و اساسی ماشین های شارمحور ورنیرو چطور میشه بدست آورد؟ رفرنس خاصی دارید در این زمینه؟
من میخوام از اولیه ماشین شارمحور ورنیر برای استفاده در خودروهای برق طراحی کنم اول روی کاغذ و بعد مدلسازی به روش mec و در نهایت صحت سنجی با شبیه سازی در مکسول
سلام
مکان خاصی نیست باید مقالات ریویو را مطالعه کنید
این معادلاتی که شما برای ماشین ورنیر شار شعاعی بدست آوردین برای همه ماشین های ورنیر شار شعاعی صادق هست یا صرفا برای این پروژه خاص میشه استناد کرد؟
هر نوع ماشینی شاخه های مختلفی ازش هست، عموما تا یه جایی بنیاد یکی هست ولی بعدش متفاوت هست
پس به صورت کلی نمیشه این معادلات را برای تمام شار شعاعی های ورنیر اختصاص داد
مهندس جان میشه از شارمحورهای معمولی برای بدست آوردن معادلات شارمحور ورنیر استفاده کرد؟ چون تقریبا ساختار هاشون یکیه حالا از جفت قطب های بیشتری استفاده کرده
نه متفاوت هستند خیلی ام
در زمینه خودروهای برقی, ورنیر شارمحور بهتره یا شار شعاعی
و کدام یک بر دیگری برتری داره؟
قطعا شار محور
ولی خوب چون جدید هست تجاری نشده به ان صورت
با تشکر از مطلب خوبتون رابطه 31 نیفتاده
ممنون بابت اطلاع دادن، درست شد
عالی بود فقط اگه میشه فایلpdf رو هم قرار بدین
سلام
این موارد تایپ شده اگر علاقه مند به مطالعه در پی دی اف هستید کافیه سرچ کنید تبدیل سایت به پی دی اف هست به راحتی واستون تبدیل می کنند
سلام مثل همیشه عالی و کاربردی و اولین
تشکر فراوان از آقای مهندس سیاه تیری
سلام
ممنون از نظر محبت آمیزتون
مهندس خدایی عالی بود
خییییییییییییییلی ممنون
سلام
خواهش می کنم موفق باشید