درایو (Drive) چیست
-
آپدیت شده در :

عمده افراد تصور میکنند که درایو الکتریکی تنها برای ما کنترل سرعت موتور را به ارمغان آورد ولی در حقیقت درایو بیش از اینها به صنعت برق بخصوص ماشینهای AC خدمت نمود، تا پیش از درایو بازار روی خوشی به ماشینهای AC نشان نمیداد و همچنان موتورهای DC با قابلیت کنترل سرعت از مزیت بیشتری نسبت به موتورهای AC برخوردار بودند، چرا که موتورهای AC از مسئله جریان استارت بالا رنج میبردند (گاهاً تا 8 برابر سرعت نامی) و همین مسئله باعث ایجاد تنش در منابع تغذیه آنها میگشت. در این مراحل بودیم که درایو الکتریکی با ظهور خود به یکباره تمام معادلات مارکت جهانی را به هم زد و امکاناتی از کنترل سرعت گرفته تا صرفهجویی در مصرف برق به ارمغان آورد.
آنچه که در این نوشتار خواهید خواند:
- تعریف درایو
- تاریخچه درایو الکتریکی
- چرا به درایو نیاز است
- تفاوت اینورتر و درایو
- جایگاه درایو در یک سیستم
- ساختار درایو
- درایو VFD
- انواع درایو VFD
- روشهای کنترلی درایو VFD
- تکنولوژی Real time در درایو
- مزایای درایو
- معایب درایو
- سوالات متداول درایو
- منابع
در این پست میخواهیم به شکلی کاملاً تخصصی در ابتدا نگاهی به تاریخچه درایو داشته باشیم و پس از آن به دلایل ظهور آن بپردازیم. مسلماً برای ما اهداف علمی این نوشتار بسیار ارزشمند است پس به ساختار درایو با وسواس خواهیم پرداخت و مواردی مانند VFD و روشهای کنترلی که خود انقلابی در بخش اینورتر درایو هستند خواهیم پرداخت و در پایان این بخش روش بسیار عالی کنترل مستقیم گشتاور (DTC) را برای شما عزیزان شرح خواهیم داد. در پایان نیز به تاثیر المانهای اساسی مانند؛ توان، سطح جریان و … در انتخاب یک درایو که جوابگوی نیازهای ما باشد اشاره میکنیم تا شما بهراحتی بتوانید درایو مناسب موتور الکتریکی خود را تهیه و کانفیگ نمایید.
قبل از ورود به بررسی اجازه دهید کار را با دیدن یک کلیپ کوتاه در مورد معرفی درایو (VFD) شروع نماییم، بدین ترتیب شما را به دیدن این کلیپ کوتاه که توسط تیم PowerEn به فارسی ترجمه و زیرنویس شده است دعوت مینماییم.
دانلود فیلم درایو الکتریکی چیست – Full HD | با حجم 23 مگابايت
تعریف درایو
بهصورت کلی به دستگاهی که سبب کنترل یک ماشین الکتریکی شود درایو گفته میشود. عمدتاً به درایوی که صرفاً برای ماشینهای الکتریکی استفاده گردد Electrical drive نیز میگویند.
یکی از اهداف اساسی درایو تنظیم دور ماشینهای الکتریکی میباشد. پس در همین ابتدا در نظر داشته باشید که مهمترین وظیفه درایوها تنظیم دور موتور از صفر تا چندین برابر دور نامی موتور به طور پیوسته میباشد بااینحال درایوها میتوانند وظایف متنوع دیگری نظیر کنترل؛ گشتاور، شتاب، جریان، ولتاژ و … را انجام دهند که انجام هرکدام از آنها به نحوهٔ نیاز به یک سنسور و یا فیدبک خواهد داشت.
البته کاربرد درایو تنها به اینجا ختم نمیشود، یک درایو میتواند موتور را بهصورت چپگرد، راستگرد و یا در یک گشتاور خاص استارت نماید.
احتمالاً از خود میپرسید که تنظیم گشتاور و یا حتی سرعت موتور در یک موتور عادی که قرار است در سرعت ثابت کار کند به چهکار میآید؟
ماشینهای الکتریکی هیچگاه نمیتوانند بهصورت ذاتی در یک شرایط کاملاً ایدهآل در سرعت و گشتاور مشخصی عمل نمایند، چرا که در واقعیت بارهای مکانیکی پیوسته در حال تغییر بوده و همین مسئله میتواند بر عملکرد موتور تاثیر بسزایی بگذارد، به همین جهت درایو وارد عمل شده و همواره با کنترل متغیرهای تعریف شده سعی در نگهداشتن موتور در یک سرعت و یا گشتاور ثابت میکند، این بدین معناست که شاید در ظاهر، موتور شما در سرعت ثابت در حال چرخش است ولی در عمل به دلایل مختلف این سرعت کم و یا زیاد خواهد شد که درنهایت سبب کاهش راندمان میگردد.
تنظیم دور در موتورهای الکتریکی علاوه بر کاربردهای فراوان در پروسههای صنعتی، منجر به صرفهجویی مصرف انرژی هم میگردد. علاوهبرآن درایوها سبب کاهش چشمگیر جریان راهاندازی در موتور میشوند بطوریکه این جریان خیلی کمتر از جریان اسمی موتور میباشد.
از دیگر ویژگیهای درایوها میتوان به استارت و استاپ نرم و کاملاً کنترل شده در موتورهای الکتریکی اشاره نمود. با استفاده از درایو، زمان Start و Stop را میتوان بهدقت تنظیم نمود. این زمانها میتوانند کسری از ثانیه و یا صدها دقیقه باشند. توانائی درایو در استارت و استاپ نرم موجب کاهش قابلملاحظه تنشهای مکانیکی در کوپلینگها و سایر ادوات دوار میگردد.
تاریخچه درایو الکتریکی
اطلاعات دقیقی در مورد نخستین درایو الکتریکی در دست نیست بااینحال گفته میشود اولین درایو توسط آقای B.S.Iakobi در روسیه و در سال 1838 (1217 ه.ش) ساخته شده است. باتوجهبه زمان یاد شده همان گونه که از منابع مشخص است این دستگاه یک Drive موتور DC بوده است که با استفاده از یک منبع باتری میتوانستند سرعت یک قایق را در آب کنترل نمایند.[1]
بااینحال اگر بخواهیم طبق اسنادی که در دسترس است به تکامل درایو اشاره کنیم، نخستین آنها درایوهای موتور جریان مستقیم بودند که در سالهای 1950 (1329 ه.ش) ساخته شده و در سالهای 1960 (1339 ه.ش) وارد صنعت شدند. دلیل پیشرفت درایوها در این سالها توسعه ادوات سوئچینگ قدرت یعنی تریستورها بودند. در اواخر دهه 1960 (1339 ه.ش) مدارات قدرت آنالوگ با کنترلرهای دیجیتال بر اساس تعیین زمان آتش توسعه یافتند و در سالهای بعد استفاده از PWM در مدارات گسترش یافت و نهایتاً در سالهای 1980 و 1990 (1359 و 1369 ه.ش) ادوات قدرت IGBT نیز ساخته شده و در این سالها درایوهای موتور القایی تکامل یافت.
شاید مستندترین درایو را بتوان در سال 1958 (1337 ه.ش) که توسط شرکت آمریکایی جنرال الکتریک (General Electric) که یک دستگاه شامل اجزای نیمههادی قابلکنترل با Thyristor بود نامید که با استفاده از آن میتوانستند سرعت یک موتور الکتریکی AC را کنترل نمایند.
چرا به درایو نیاز است
شاید باتوجهبه توضیحات ذکر شده نیازی به این بخش نباشد ولی برای اینکه از جادوی درایو الکتریکی مطلع شوید این قسمت نیز اضافه شد.
نیازمندی به درایو را میتوان از دو بعد بررسی کرد:
- کاهش چشمگیر تلفات
- افزایش انعطافپذیری سیستم
افزایش انعطافپذیری: تصور کنید که شما یک موتور الکتریکی 4 مگاوات دارید و بنابر نیازتان احتیاج است که این موتور در ساعاتی مشخص تنها با توان نامی 1 مگاوات عمل نماید (هدف استفاده بهینه از موتور در توان 1 مگاوات میباشد)، با داشتن یک درایو الکتریکی شما بهراحتی میتوانید با همان موتور 4 مگاوات خود این نیاز را پاسخ دهید، اگر ما به درایو دسترسی نمیداشتیم صرفاً برای چند ساعت باید یک موتور الکتریکی مجزا با توان 1 مگاوات تهیه میکردیم!
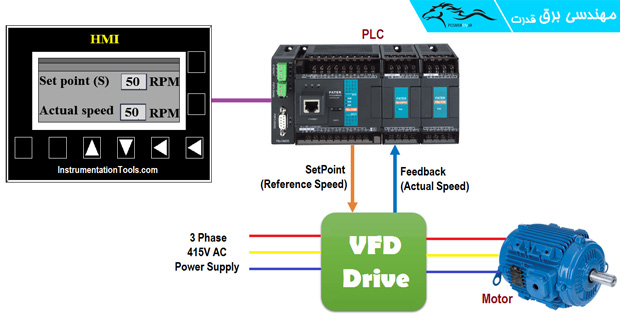
اگر بخواهیم همین مسئله را در اتوماسیون صنعتی که به شدت مورداستفاده قرار میگیرد بیان کنیم به این شکل خواهد بود: کارخانهای در دو شیفت دو محصول مجزا را تولید میکند (اکثر کارخانهها برای تولید یک محصول مشخص، اجزای آن را در شیفتهای مختلف تولید میکنند)، در شیفت شماره 1 نیاز است که نوار نقاله با سرعت 0.1 متر در ثانیه حرکت کرده و در نهایت در شیفت شماره 2 این عدد به 0.2 متر در ثانیه برسد، برای این منظور به یک موتور الکتریکی، درایو الکتریکی و یک PLC جهت کنترل تمام فرآیند نیاز خواهید داشت.
خوشبختانه درایوهای امروزی بهراحتی به انواع روشهای ارتباطی مانند؛ DeviceNet، PROFIBUS DP، ControlNet، MODBUS، PROFINET، Ethernet/IP و … مجهز شدهاند که همین مسئله سبب کنترل از راه دور آنها توسط دستگاههای متفاوت شده است.
مثالهای کنترل سرعت را بهوفور در صنایع و کاربردهای خانگی مشاهده کردهاید اما کنترل گشتاور ثابت در کجا استفاده میشود؟
گاهی مواقع نیاز است که موتور به نیروی وارد شده از بیرون عکسالعمل بهاندازه داشته باشد، یک مثال خوب دریچه پرتاب موشک در جتهای جنگی است، این دریچهها باتوجهبه ارتفاع و جهتگیریهای آنی پرنده نیاز به گشتاور ثابت برای عملکرد صحیح دارند به همین دلیل عمدتاً برای بازشدن آنها از درایو با امکان کنترل گشتاور ثابت استفاده میگردد.
کاهش چشمگیر تلفات: مهمترین دلیل برای استفاده از درایو را میتوان کاهش چشمگیر تلفات آنهم در مقیاس بسیار بزرگ (تصمیمات کلان کشوری) دانست.
استفاده از درایو در سطح کشوری سبب صرفهجویی تقریباً 50% در مصرف انرژی میگردد!
احتمالاً شما هم از گزاره بالا تعجب کردهاید، اجازه دهید این مطلب را با استفاده از یک مثال عملی اثبات کنیم.
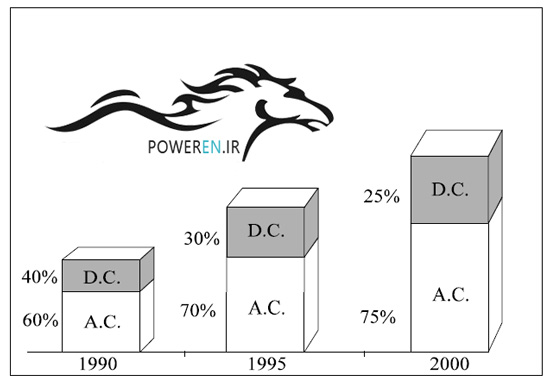
در زیر دو سیستم کاملاً مشابه را برای شما در نظر گرفتهایم، در شکل شماره 1 از درایو استفاده نشده است بلکه بهصورت قدیمی از یک “Throttling Control” استفاده کردهایم، مشاهده میکنید که برای تامین تنها 10 کیلووات توان موردنیاز بار باید 92.5 کیلووات توان تولید نماییم!
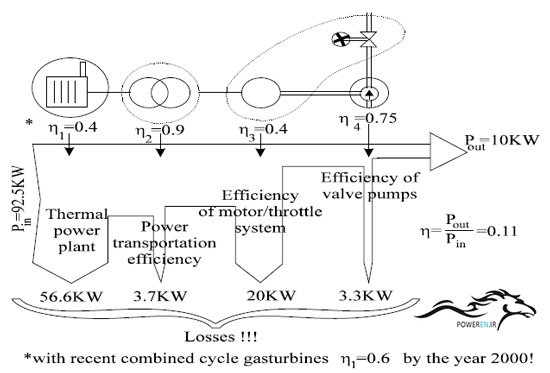
در سیستم شماره 2 از درایو استفاده کردهایم و بهجای تولید 92.5 کیلووات توان تنها باید 43.7 کیلووات توان تولید نماییم که با همین تغییر ساده، 48.8 کیلووات در تولید توان صرفهجویی رخداده است!

در مقیاس کلان عدد اعلام شده میتواند سبب حذف نیمی از نیروگاههای سیکل ترکیبی، آبی و … یک کشور شود به همین دلیل سیاست کلی بسیاری از کشورها ارائه کمک مالی جهت بکار گرفتن عموم مردم از درایو میباشد. این مثال تنها به موارد صنعتی پرداخت درحالیکه مشخصاً لوازمخانگی که از درایو استفاده میکنند عمدتاً برچسب انرژی A و A+ دریافت کردهاند که آنها هم میتوانند سبب صرفهجویی بسیاری در مصرف انرژی در سطح کلان گردند.
تفاوت اینورتر و درایو
باتوجهبه اینکه پیشتر در مورد اینورتر مفصل صحبت کردهایم تاکنون متوجه شدهاید که اینورتر و درایو دو تجهیز کاملاً مجزا میباشند. اینورتر عمدتاً بخشی از سایر قسمتهای یک درایو را تشکیل میدهد، پس یک درایو بهاحتمال زیاد درون خود یک اینورتر جهت تبدیل جریان DC به AC دارد.
جایگاه درایو در یک سیستم
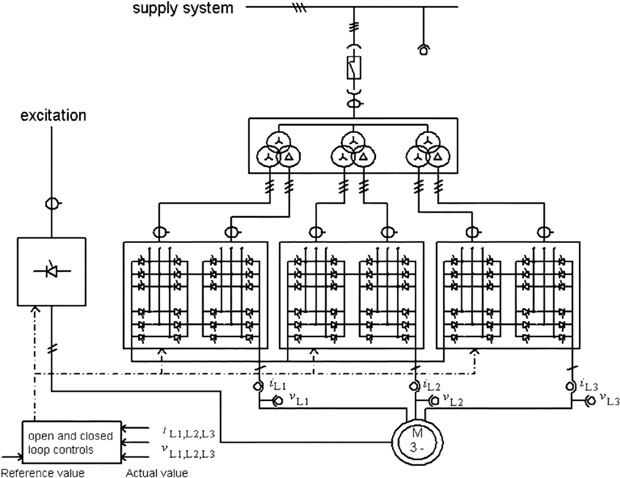
بهصورت کلی در کنار هم قرارگرفتن تعدادی دستگاه جهت انجام یک هدف مشخص مانند کنترل کردن را درایو مینامیم، گاهی در این مجموعه مانند تصویر زیر خود موتور الکتریکی نیز شامل میشود ولی بهصورت دقیق مجموعه کنترلی ما که عمدتاً شامل؛ یکسوکننده، اینورتر و سنسورها میباشد یک Drive را تشکیل میدهد.
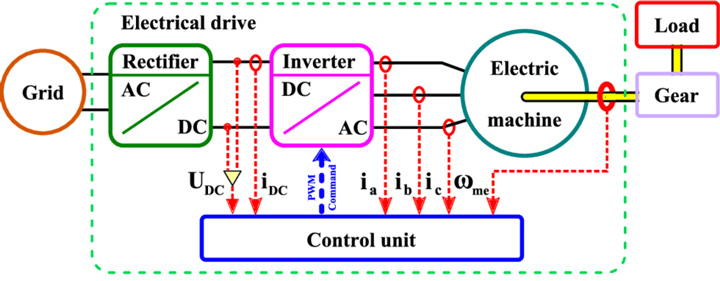
همان گونه که در تصویر بالا مشاهده میکنید منطقه سبزرنگ بهعنوان واحد کنترل محسوب میشود که اگر ماشین الکتریکی موجود در آن را مجزا در نظر بگیریم شاهد یک درایو الکتریکی خواهیم بود، در این واحد، کنترل ولتاژ AC در ابتدا توسط Rectifier به ولتاژ DC تبدیل میشود، پس از تبدیل نمونههای جریان و ولتاژ DC، جهت انجام محاسبات بعدی در واحد کنترل ذخیره میگردند، در ادامه ولتاژ DC به ولتاژ AC توسط اینورتر با فرکانس تعیین شده تبدیل میگردد در این مرحله نیز از تمام جریانهای فازی نمونهبرداری میگردد و در نهایت با داشتن چرخش زاویهای موتور و سایر نمونهها میتوانیم ولتاژ و فرکانس موردنیاز جهت ارائه یک عکسالعمل مناسب نسبت به بار را تعیین نماییم.
ساختار درایو
اجازه دهید بهجای تشریح ساختار درایو بهعنوان یک مهندس برق به بلوک دیاگرام درایو الکتریکی بپردازیم، به این صورت تحلیلمان را دقیق پیش خواهیم برد.

همان گونه که در تصویر بالا مشهود است در این سیستم مواردی مانند؛ منبع تغذیه، مدولاتورهای توان (Power Modulators)، موتورهای الکتریکی، بار (Load)، واحد کنترل (Control Unti) و واحد حسگر (Sensing Unit) به چشم میخورد که در ادامه به بررسی مهمترین آنها خواهیم پرداخت.[2]
منبع تغذیه
منبع تغذیه میتواند تکفاز یا سهفاز باشد. منبع تغذیه AC سهفاز 50 هرتز رایجترین نوع منبع تغذیه الکتریکی در کاربردهای خانگی و صنعتی است. موتورهای سنکرون که با منبع 50 هرتز تغذیه میشوند، دارای بیشینه سرعت 3000rpm هستند. برای سرعتهای بیشتر از این مقدار، به منبع تغذیه با فرکانس بالاتر نیاز است. موتورهایی با توان کم و متوسط، با منابع تغذیه 400v تغذیه میشوند. البته مقادیر بزرگتر ولتاژ مانند 3.3Kv، 6.6Kv یا 11Kv نیز وجود دارند.
مدولاتور توان
مدولاتورهای توان تجهیزاتی هستند که برای تغییر فرکانس و همینطور تغییر شدت توان، بهمنظور کنترل درایوهای الکتریکی مورداستفاده قرار میگیرند. درواقع مدولاتورهای توان، توان خارج شده از منبع تغذیه را regulate (تنظیم کردن) میکنند. این کنترل و تنظیم بهگونهای است که در نهایت مشخصه سرعت-گشتاور موتور الکتریکی متناسب با بار آن تنظیم گردد.
مدولاتور توان در عمل مغز اصلی درایو ما بوده و در آن تصمیماتی مانند؛ استارت، ترمز، برعکس شدن جهت چرخش، مدیریت جریان (جلوگیری از آسیب به منبع تغذیه) و بهصورت کلی تبدیل صور انرژی (DC به AC، AC به DC و …) در این بخش صورت میپذیرد.
مدولاتورهای توان معمولاً به سه دسته زیر تقسیم میشوند:
- مبدلها
- مدارهای امپدانس متغیر
- مدارهای کلیدزنی (Switching)
مبدل
همانطور که از نام آنها نیز مشخص است، مبدلها برای تبدیل توان مورداستفاده قرار میگیرند. بسته به نوع کاربرد، مبدلها به 5 دسته اساسی تقسیمبندی میشوند:
مبدل AC به DC
مبدلهای AC به DC برای بهدستآوردن ولتاژ تغذیه ثابت DC از ولتاژ تغذیه ثابت AC مورداستفاده قرار میگیرند.
تنظیمکننده یا رگولاتور AC
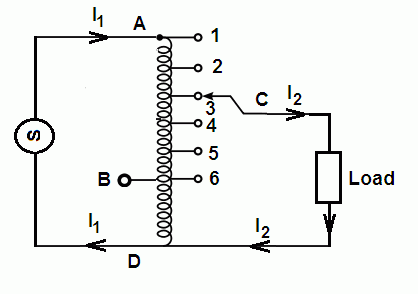
تنظیمکنندههای AC برای بهدستآوردن یک ولتاژ AC تنظیم شده مورداستفاده قرار میگیرند و در این نوع از مبدلها اغلب از اتوترانسفورمرها (Autotransformer) یا ترانسفورماتورهای تغییردهنده سر وسط (Tap Changer Transformers) استفاده میشود.
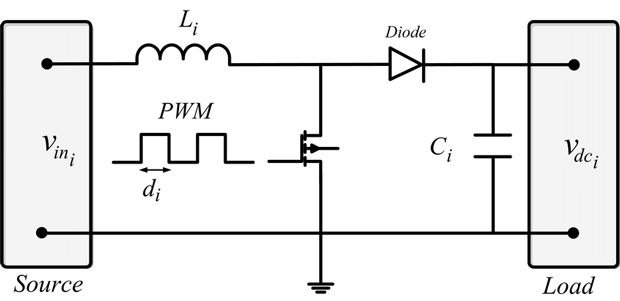
مبدل DC به DC
مبدلهای DC به DC یک ولتاژ DC متغیر را دریافت کرده و یک ولتاژ DC ثابت تولید میکنند. ترانزیستورهای قدرت،IGBT، GTO و ماسفتهای (MOSFET) قدرت به این منظور مورداستفاده قرار میگیرند.
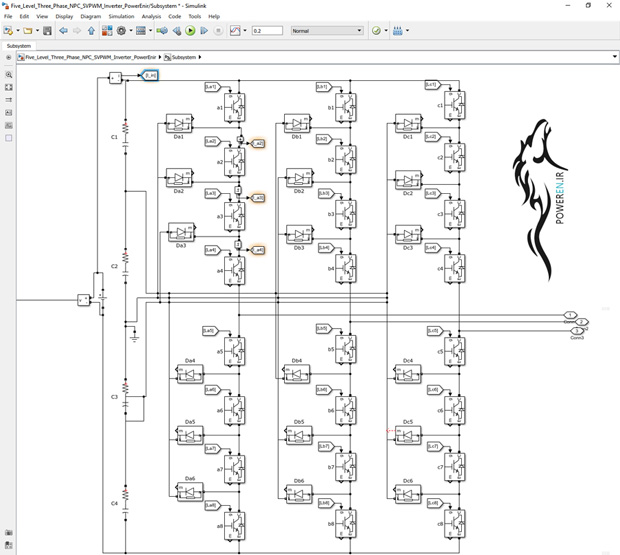
اینورتر (DC به AC)
در مورد اینورتر قبلاً مفصل صحبت کردیم، اینورتر دستگاهی است که جریان مستقیم را به جریان متناوب با فرکانس مشخص تبدیل میکند. در زیر نمایی از مدار گسترده یک اینورتر 5 سطحی از نوع SVPWM را مشاهده مینمایید.
سیکلوکانورتر (AC به AC)
بیشتر درایوهای ساخته شده جهت تولید یک ولتاژ AC به فرکانس مشخص، در ابتدا از یک منبع ولتاژ AC توان را دریافت کرده و سپس آن را به DC تبدیل میکنند، در نهایت با استفاده از یک اینورتر، DC را به AC مدنظر با فرکانس مشخص تبدیل مینمایند، احتمالاً از خودتان میپرسید چرا مستقیماً AC را به AC با ولتاژ و فرکانس مشخص تبدیل نکنیم و اینهمه راه نرویم!
جواب سوال شما دستگاه جدیدی به نام سیکلوکانورترها میباشد، البته این روش تبدیل بسیار دشوار و هزینهبر بوده (برای توانهای بالا نیز محدودیتهای زیادی شامل میشود) و همچنان در صنعت از همان روش نخست استفاده میگردد.
سیکلوکانورترها برای تبدیل ولتاژ AC با دامنه و فرکانس ثابت به یک ولتاژ AC با دامنه و فرکانس متغیر به کار میروند. در این مبدل، تریستورها (Thyristor) برای کنترل سیگنال آتش مورداستفاده قرار میگیرند.
مدارهای امپدانس متغیر
این مدارها برای کنترل سرعت از طریق تغییر مقاومت یا امپدانس مدار مورداستفاده قرار میگیرند. البته این روش کنترل در درایوهای DC یا AC ارزانقیمت به کار میرود. بهمنظور کنترل موتور، دو یا تعداد بیشتری پله وجود دارند که میتوانند بهصورت دستی یا اتوماتیک بهوسیله کنتاکتور (Contactor) کنترل شوند. برای محدودکردن جریان راهاندازی در موتورهای AC از سلفها استفاده میشود.
مدارهای کلیدزنی
در موتورها و درایوهای الکتریکی برای راهاندازی نرم موتور از مدارهای کلیدزنی استفاده میشود. همچنین این مدارات در زمانهایی که عیبی اتفاق بیفتد، از موتور محافظت میکنند. کاربرد دیگر مدارات کلیدزنی، برای تغییر عملیات سیستم کنترل موتور در حالت کار عادی آن است.
مدارهای کلیدزنی برای راهاندازی موتور و درایو آن بر اساس یک برنامه از قبل تعیین شده پیادهسازی میشوند و امکاناتی نظیر قفل داخلی (اینترلاک: جلوگیری از ایجاد دو حالت متناقض در موتور مانند ارسال همزمان فرمان چپگرد و راستگرد) و قطع کردن موتور از مدار اصلی را در شرایط رخدادن عیب یا عملکرد غیرطبیعی فراهم میسازند.
واحد کنترل
واحد کنترل باتوجهبه شرایط خاصی که دارد تنها در توان و ولتاژ پایین عمل میکند. انتخاب واحد کنترل به نوع مدولاتور و قدرتی که استفاده میشود، بستگی دارد. مخصوصاً موقع استفاده از مبدلهای نیمههادی، واحدهای کنترلی تنوع زیادی دارند. در این شرایط واحد کنترل، شامل یک مدار آتشزنی (کلیدزنی) است که در آن از المانهای خطی و میکروپروسسورها استفاده میشود. این واحد برخی مواقع میتواند در نقش حفاظت از موتور و مدولاتور توان نیز ایفای نقش نماید.
واحد Sensing
این واحد وظیفه انجام تمام نمونهبرداریها در طول فرآیند را برعهده دارد، هر زمان این واحد در سیستم ما وجود داشت خبر از یک سیستم کنترلی حلقه بسته میدهد. این بخش خود شامل مواردی مانند؛ Speed sensing، Torque sensing، Position sensing، Current and Voltage sensing و Temperature sensing میباشد.
انواع درایو الکتریکی
درایوهای الکتریکی میتوانند در شکلها و کاربردهای مختلفی دستهبندی شوند، در ادامه برخی از این دستهبندیها را مرور میکنیم.
درایو الکتریکی بر اساس منبع تغذیه
- درایوهای AC
- درایوهای DC
درایو الکتریکی بر اساس سرعت چرخش
- درایو سرعت ثابت (Constant speed drive)
- درایو سرعت متغیر (Variable speed drives)
درایو الکتریکی بر اساس تعداد موتور
- درایو تک موتور
- درایو چند موتوری
درایو الکتریکی بر اساس متغیر کنترل
- درایو گشتاور ثابت
- درایو توان ثابت
همان گونه که مشاهده کردید دستهبندیهای متنوعی برای درایو الکتریکی در نظر گرفته میشود، بااینحال همچنان مهمترین دستهبندی، دستهبندی بر اساس منبع تغذیه میباشد که در ادامه بیشتر به آن خواهیم پرداخت.
ازآنجاییکه تمرکز ما در این پست بیشتر بروی درایوهای AC میباشد پس در ادامه به زیر مجموعههای این درایو محبوب میپردازیم.
درایوهای AC
درایوهای AC تمام خصوصیات یک درایو مجهز که تاکنون بیان شده مانند؛ کنترل سرعت، گشتاور، شتاب، جهت چرخش، مدیریت توان و … را به همراه دارد. مهمترین وظیفه این درایوها کنترل و تنظیم توان موردنیاز باتوجهبه بار است که در نهایت سبب صرفهجویی بسیار زیادی در مصرف توان الکتریکی خواهد شد.
هدف از ارائه درایوهای AC یافتن یک جایگزین الکتریکال برای؛ گیربکسهای مکانیکی، تسمه، کوپل هیدرولیکی، درایوهای DC! و … میباشد. از مزایای این درایوها میتوان به؛ رنج کنترلی بسیار دقیق و نرم در سرعت و گشتاور، پیادهسازی حالت بهینه، نگهداری آسان، حجم و اندازه کوچک، ارتباطات پیشرفته و بهرهمندی از تکنولوژی روز اشاره نمود.
در صنعت درایوهای AC بر اساس توان آنها دستهبندی میشوند، دلیل آن هم مشخص است چرا که قرار است حجم بازار ارزیابی گردد تا درنهایت شرکتهای سرمایهگذاری بتوانند یک دید خوب نسبت به آینده با ارقام و نمودار داشته باشند، این دستهبندی عبارت است از:
- میکرو درایو (0 تا 5 کیلووات)
- Low-End درایو (5 تا 40 کیلووات)
- درایو میانی – Midrange (41 تا 200 کیلووات)
- High-End درایو (201 تا 600 کیلووات)
- مگا درایو (بیش از 600 کیلووات)
ازآنجاییکه هدف این نوشتار تحلیل علمی است پس کاری با دستهبندی از نوع مارکتینگ درایو AC نداریم و به بررسی تکنولوژی ساخت درایو AC از دید یک مهندس برق خواهیم پرداخت.
درایو AC نامهای دیگری نیز دارد که مطرحترین آنها VFD یا variable-frequency drive میباشد. از دیگر نامها میتوان به؛ AFD یا adjustable-frequency drive، VVVF یا variable-voltage/variable-frequency، VSD یا variable speed drive و … اشاره کرد که همگی آنها جهت کنترل سرعت و گشتاور یک موتور الکتریکی AC با تغییر ولتاژ و فرکانس عمل میکنند.
درایو VFD

درایو فرکانس-متغیر سیستمی برای کنترل سرعت موتورهای جریان متناوب است. این درایوها افزون بر کاربرد کنترل سرعت، میتوانند در سرعتهای پایین به منحنی مشخصهٔ گشتاور-سرعت مطلوبی مشابه موتورهای جریان مستقیم دست یابند، بهطوریکه در بسیاری از کاربردها بتوان موتورهای جریان مستقیم را با موتورهای جریان متناوب قفس سنجابی جایگزین کرد.[3]
25% از کل انرژی الکتریکی در جهان توسط موتورهای الکتریکی مصرف میگردد[4]
فرکانس (یا هرتز) به طور مستقیم با سرعت موتور (RPM) مرتبط است. بهعبارتدیگر، فرکانس بیشتر باعث گردش سریعتر موتور و افزایش RPM میشود. اگر شما در شرایطی نیاز ندارید که موتور در سرعت نامی عمل نماید بهراحتی میتوانید با استفاده از یک VFD فرکانس و ولتاژ اعمال شده به موتور را بر اساس نیازتان تنظیم نمایید، در این حالت موتور بدون اینکه دچار افزایش تلفات و یا کاهش شدید راندمان گردد بهراحتی به وظیفه خود عمل خواهد نمود.
در برخی موارد نیز ممکن است که شما به گشتاور راهاندازی بالایی نیاز داشته باشید، بهعنوانمثال قطار مترو هنگامیکه میخواهد از حالت سکون جدا شود باتوجهبه تعداد مسافرهای سوار شده به گشتاورهای مختلفی نیاز خواهد داشت در این شرایط میتوانیم با استفاده یک درایو وی اف دی گشتاور موتور را با بار تطبیق دهیم.
VFD در واقع یک درایو کامل میباشد که در درون خود تمام موارد ذکر شده تاکنون نظیر؛ رکتیفایر، اینورتر، واحد کنترل و … را دارد
نکته بسیار مهم: VFD یک اینورتر نیست! بلکه یک درایو بوده که اینورتر قسمتی از آن میباشد.

متاسفانه در بسیاری از وب سایتهای فارسیزبان بهاشتباه درایو VFD را اینورتر مینامند درحالیکه باتوجهبه توضیحاتی که داده شد، اینورتر قسمتی از درایو وی اف دی بوده که در آن تبدیل جریان DC به جریان AC با سطح ولتاژ و فرکانس مشخص صورت میپذیرد.
انواع درایو VFD
درایوهای AC یا همان VFD بهصورت کلی بر اساس مقالات تحقیقاتی چاپ شده به 6 نوع تقسیم میشوند که در ادامه به شکل مختصر به آنها خواهیم پرداخت.[5]
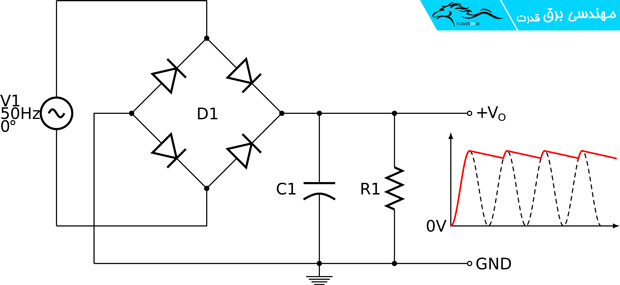
درایو با داشتن اینورتر منبع ولتاژی (Voltage-Source Inverter-VSI): در مدل VSI، در بخش لینک DC خروجی یکسوکننده (مکانی که ولتاژ AC به DC تبدیل میگردد) خازن وظیفه ذخیرهسازی انرژی و سپس تغذیه اینورتر با این ولتاژ ذخیره شده را دارد، بخش عمدهای از درایوهای ساخته شده از نوع VSI هستند. درایو ویاسای از ولتاژ خروجی PWM استفاده میکند.
درایو با داشتن اینورتر منبع جریان (Current-Source Inverter-CSI): در مدل CSI، خروجی DC حاصل از مبدل AC به DC که در این مدل از نوع پل SCR یا Silicon Controlled Rectifier میباشد[6] در یک سلف سری جهت تغذیه اینورتر ذخیره میگردد. یک درایو CSI علاوه بر پشتیبانی از PWM از “شکل موج شش پلهای” نیز پشتیبانی میکند.
درایو با اینورتر 6 پلهای (Six-Step Inverter): این مدل را میتوان جز منسوخ شدهها قرارداد، درایوهای 6 پلهای بهصورت کلی هم میتوانند از نوع VSI و هم از نوع CSI باشند. نامهای دیگر این مدل Pulse-Amplitude Modulation یا PAM، درایو موج مربعی و اینورتر چاپر DC نیز میباشد.[7]
درایو با داشتن اینورتر جابهجاکننده بار (Load Commutated Inverter-LCI): درایو LCI در واقع یک درایو CSI خاص میباشد که در آن انرژی ذخیره شده در لینک DC خروجی مبدل پل SCR به همراه سلف مدار DC به نحوهٔ بهصورت شِبه سینوسی ولتاژ و جریان اینورتر نوع SCR-bridge را تامین میکنند.
درایو سیکلوکانورتر یا ماتریسی (Cycloconverter or Matrix Converter-MC): همان گونه که قبلتر عرض شد سیکلوکانورتر در واقع یک مبدل AC به AC میباشد پس در این درایو خبری از مبدل یکسوکننده یا لینک DC نمیباشد. سیکلوکانورتر عمدتاً بهصورت منبع جریان سهفاز با پلهای SCR کانفیگ میشود که در هر فاز آن یک سیکلوکانورتر بهصورت مجزا فرکانس و سطح ولتاژ ثابت در ورودی را به فرکانس و ولتاژ متغیر در خروجی تبدیل میکند. کلیدزنی در این اینورتر با استفاده از IGBTها صورت میپذیرد.
درایو با سیستم بازیافت لغزش با تغذیه دوسویه (Doubly Fed Slip Recovery System): در این روش، هدف تغذیه دوسویه درایو جهت کنترل سرعت موتور میباشد، از یک سو توان AC کنترل شده و از سوی دیگر لینک DC جریان به نحوهٔ تنظیم میگردند تا بتوان به خواسته مدنظرمان برسیم.
روشهای کنترلی درایو VFD
تاکنون در مورد سختافزار درایو صحبت کردیم و همانطور که ملاحظه نمودید مهمترین بخش یک درایو، اینورتر آن است به این صورت که عملکرد کلی و بازده یک درایو بیشتر تحت تاثیر اینورتر قرار گرفته در آن میباشد.
ازآنجاییکه تکنولوژی تبدیل AC به DC که در بخش رکتیفایر (یکسوکننده) صورت میپذیرد نسبت به اینورتر (DC به AC) سادهتر میباشد به همین دلیل روشهای کنترلی درایو VFD بهصورت کلی به روشهای کنترلی Inverter یک درایو اطلاق میشود. باتوجهبه موارد گفته شده بهصورت کلی سه روش عمده کنترل درایو VFD وجود دارد که در ادامه بیشتر از آنها خواهیم گفت.
- کنترل اسکالر – V/HZ PWM (Scalar Control)
- کنترل میدان مغناطیسی Field-Oriented Control یا کنترل برداری
- کنترل مستقیم گشتاور (Direct Torque Control – DTC)
Scalar Control
در این روش دامنه ولتاژ و فرکانس درحالیکه پیوسته نسبت v/f ثابت نگهداشته میشود کنترل میگردند. ازآنجاییکه مقادیر اعمال شده همگی اسکالر هستند به این روش کنترل اسکالر میگویند.
از طرف دیگر موتور با ولتاژ و فرکانس متغیری که توسط PWM و از طریق اینورتر تولید میشود کنترل میگردد.
قطعاً برای اعمال این روشهای کنترلی باید یک مغز متفکر در درون اینورتر قرار گیرد، برای این کار از؛ میکروکنترلر، میکروپروسسور و یا هر دستگاه دیجیتالی کنترلی استفاده میشود (این قسمت باتوجهبه سبککاری کارخانه سازنده اینورتر مشخص میگردد).
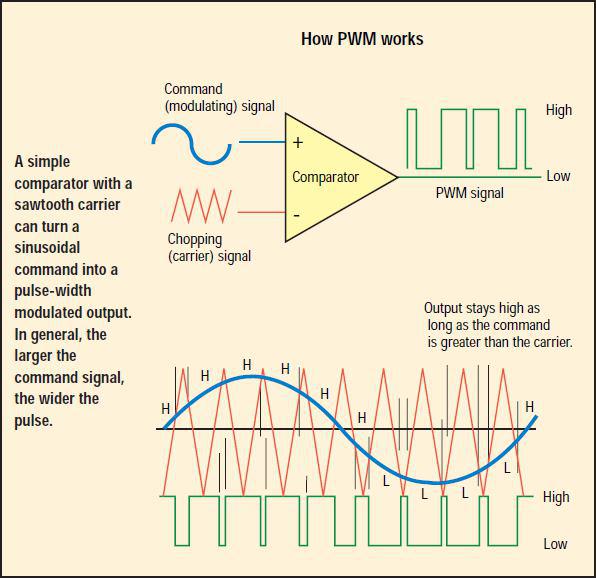
در این روش از تکنیک PWM بهصورت بنیادی استفاده میگردد پس اجازه دهید نگاهی مختصر به تعریف خود PWM داشته باشیم و بعد از آن به موضوع اصلی مجدداً بازگردیم.
PWM چیست
مُدولاسیون پهنای پالس یا مُدولاسیون عرض پالس (Pulse Width Modulation, PWM) یکی از اصطلاحات پرکاربرد در برق بوده که روشی برای تنظیم توان الکتریکیِ داده شده به بار، با تغییردادن زمان قطع و وصل شدن منبع توان به بار (در هر سیکل) است.
مدولاسیون پهنای پالس (PWM) در مهندسی الکترونیک و کنترل نیز کاربرد دارد.
بخش اصلی PWM، یک سیگنال کنترلی به شکل موج مربعی (پالس) است، بهطوریکه دورۀ کاری (Duty cycle) پالسها، در هر دورۀ تناوب موج (هر سیکل)، قابل تنظیم است.
دورۀ کاری، نسبت مدتِ High بودن موج مربعی به دورۀ تناوب آن است، و برحسب درصد (%) بیان میشود. در واقع این سیگنال، قطع و وصل شدن منبع توان به بار را تعیین میکند (مثلاً با کنترل باز و بسته شدن یک سوئیچ الکترونیکی). مثلاً اگر دورۀ کاری موج مربعی، 40% باشد، در 40% هر دورۀ تناوب، بار به منبع توان وصل است و در باقی آن، قطع میشود. در این حالت، مقدار متوسط توان داده شده به بار، برابر با 40% توان کل منبع (تغذیه) خواهد بود. اگر یک میکروکنترولر با تغذیه 5 ولت (Vcc)، سیگنال PWM با دورۀ کاری 50% تولید کند، مقدار متوسط موج مربعی تولیدشده، برابر 50% Vcc یا 2٫5 ولت خواهد بود. بهطورکلی، اگر دورۀ کاری بهصورت کسری و با D نشان داده شود، مقدار متوسط ولتاژ، برابر VccD، و مقدار مؤثر (RMS) آن، برابر Vcc*sqr(D) میشود.[8]
در مبحث طراحی منابع تغذیه و کنترل سطح ولتاژ، مدولاسیون پهنای پالس، روشی برای کنترل توان بدون نیاز به دفع یا اتلاف هرگونه توان در راهانداز (Driver) است. در واقع PWM تکنیکی است که به کمک آن میتوان مقدار ولتاژ، و مقدار توان را کنترل کرد.
مثالی از کاربرد PWM
یک لامپ 10 وات، 10 وات توان الکتریکی را به نور و گرما تبدیل میکند. برای کم کردن نور لامپ، مثلاً بهاندازه 5 وات، میتوان یک مقاومت را با لامپ سری کرد تا 5 وات توان را جذب کند، و لامپ 5 وات دیگر را جذب کند. اگرچه این کار عملی است اما اتلاف توان در مقاومت نهتنها باعث میشود که داغ شود، بلکه باعث اتلاف توان خواهد شد، درحالیکه هنوز منبع توان 10 وات را تأمین میکند.
راهحل این مشکل تغییر دوره کاری لامپ از راه روشن و خاموشکردن سریع لامپ با استفاده از یک سوئیچ است بهطوریکه آن را تنها در نیمی از دوره (سیکل) روشن کند (دورۀ کاری 50%). آنگاه به طور متوسط توان داده شده به لامپ تنها 5 وات است، و توان متوسط تأمینشده توسط منبع توان نیز تنها 5 وات خواهد بود. اگر بخواهیم لامپ 6 وات توان مصرف کند، میتوانیم سوئیچ را برای زمان بیشتری در هر سیکل روشن گذاشت، آنگاه به طور متوسط توان بیشتری به لامپ داده خواهد شد. این روشن-خاموشکردن سوئیچ، با سیگنال PWM صورت میگیرد. مقدار توان انتقالیافته به بار متناسب با دورۀ کاری پالس PWM است.
به بحث Scalar Control بازمیگردیم؛ یکی از مزایای بسیار خوب این روش عدم نیاز به دسترسی به تمام پارامترهای موتور میباشد که سبب شده این روش نسبت به دو روش دیگر در صنعت اقبال بیشتری داشته باشد. بههرحال باتوجهبه توضیحات داده شده این روش کنترلی باید بهگونهای پیادهسازی شود، برای پیادهسازی Scalar Control طرحهای متنوعی وجود دارد که در زیر آنها را یادآور شدهایم.
- PWM سینوسی (Sinusoidal PWM – SPWM)
- PWM با هدف حذف یک سری از هارمونیکها (Select Harmonic Elimination – SHE PWM)
- PWM با هدف حداقل کردن ریپل جریان (Minimum Ripple Current PWM)
- PWM تصادفی (Random PWM)
- PWM با کنترل جریان باند هیسترزیس (Hysteresis Band Current Control PWM)
- PWM سینوسی با کنترل جریان لحظهای (Sinusoidal PWM with Instantaneous Current Control)
- مدولاسیون دلتا (Delta Modulation)
- مدولاسیون سیگما دلتا (Sigma- Delta Modulation)
- PWM شش پلهای (Six-Step PWM)
- مدولاسیون بردار فضایی (Space Vector Modulation PWM – SVPWM)
PWM سینوسی (SPWM)
در این روش فرکانس سوئیچ زنی باتوجهبه سرعت رفرنس و مقدار میانگین یا RMS ولتاژِ فرکانس نهایی (که وابسته به تعداد پالس و عرض پالس میباشد) تغییر خواهد کرد. اگر عرض پالس تغییر نماید به طبع آن ولتاژ موتور نیز تغییر خواهد نمود. این ولتاژ درنهایت سبب تولید جریان شِبه سینوسی برای موتور الکتریکی خواهد شد.
از مزایای خوب این روش میتوان به ساده بودن محاسبات اشاره کرد ولی متاسفانه استفاده از متد PWM باعث تزریق هارمونیک به سیستم نیز میگردد که درنهایت دامنه ولتاژ اصلی (فاندامنتال) کمتر از 90% خواهد بود.
پس SPWM یک مدولاسیون پالس “مبتنی بر حامل – carrier-based” میباشد. در این روش سیگنال مدولاسیون یک موج سینوسی میباشد (به همین علت به آن PWM سینوسی گفته میشود) که همواره دامنه آن از سیگنال حامل (carrier-based) کمتر میباشد.
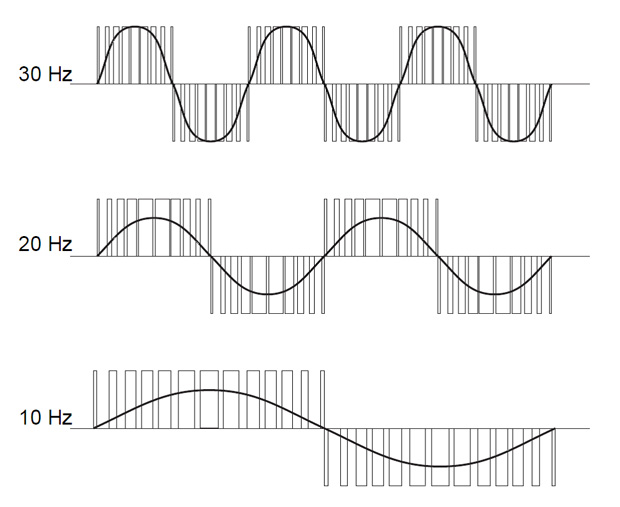
توجه داشته باشید که در روشهای PWM عمدتاً فرکانس کلیدزنی 10 الی 20 برابر فرکانس موج خروجی اصلی میباشد که در نتیجه استفاده از این تکنیکها اختلاف عددی شماره بین هارمونیک مؤلفه اصلی و سایر هارمونیکها بیشتر میشود.
استفاده از PWM سه مزیت عمده دارد:
1. اولاً اگر فاصله هارمونیک اصلی و هارمونیکهای مزاحم زیاد شود، ابعاد فیلتری که برای حذف هارمونیکهای مزاحم لازم است نیز کوچک میشود.
2. ثانیاً اگر فاصله هارمونیک اصلی و هارمونیکهای مزاحم زیاد باشد، در نتیجه فیلترکردن هارمونیکهای مزاحم، دامنه هارمونیک اصلی تضعیف نمیشود.
3. مزیت سوم استفاده از تکنیکهای PWM که اصلیترین مزیت آن نیز بهحساب میآید ایجاد قابلیت کنترل دامنه و فرکانس ولتاژ خروجی سینوسی مؤلفه اصلی اینورتر میباشد.[9]
PWM شش پلهای (Six-Step PWM)
در این روش در اینورتر VFD شش سوئیچ متمایز وجود دارند که طی یک بازه زمانی خاص آتش میشوند تا درنهایت بتوانند ولتاژ و فرکانس موتور را تنظیم نمایند. اگر بخواهیم جهت چرخش موتور را تغییر دهیم کافیست توالی فاز را با استفاده از زمان سوئیچ زنی (آتش کردن سوئیچها) ایجاد نماییم.
از مزایای این روش نبود محاسبات اضافه و از طرفی دامنه ولتاژ اصلی (Fundamental) بیشتر از لینک DC موجود، بکار گرفته خواهد شد.
بااینحال هارمونیکهای مرتبه پایین در این روش زیاد بوده و متاسفانه نمیتوان آنها را توسط اندوکتانس موتور فیلتر نمود، در نتیجه افزایش تلفات، کارکرد نامنظم و افزایش ریپل گشتاور اجتنابناپذیر خواهد بود.
مدولاسیون بردار فضایی (Space Vector Modulation PWM – SVPWM)
یکی از مهمترین اهداف در این روش سادهسازی معادلات میباشد بهگونهای که سه بردار یک موتور سهفاز که هر بردار متعلق به یک فاز میباشند به یک بردار چرخشی تبدیل خواهند شد.

در این روش دو چالش عمده وجود دارد:
- سطح ولتاژ محدود بوده و تنها به لینک DC وابسته است که همان گونه که اطلاع دارید عمدتاً این ولتاژ تغییر نخواهد کرد.
- تنها 6 زاویه متفاوت برای ولتاژ موجود است و نمیتوان زاویههای میانی آنها را تولید کرد، برای چرخش نرم یک موتور به زوایای متفاوتی نیاز است و مسلماً این محدودیت آثار منفی در پی خواهد داشت.
Field-oriented Control یا کنترل برداری (Vector Control)
ک. هاس از دانشگاه فنی دارمشتات و اف (Technische Universität Darmstadt’s K. Hasse) و بلاسک از زیمنس (Siemens’ F. Blaschke) ، پیشگامان کنترل برداری (وکتور کنترل) موتور جریان متناوب (AC) بودند که در سال 1968 (1347 ه.ش) و در اوایل دهه 1970 هاس در مورد پیشنهاد وکتور کنترل (کنترل برداری) غیرمستقیم و بلاسک از نظر پیشنهاد وکتور کنترل (کنترل برداری) مستقیم شروع به کار کردند.
ورنر لئونارد از دانشگاه فنی براونشوایگ (Braunschweig)، تکنیکها و روشهای کنترل برداری (FOC) را بیشتر توسعه داد که ابزاری در راهگشایی فرصتهایی برای جایگزینی و بازاریابی اینورتر جریان متناوب (AC) در جایگزین رقابتی با اینورترهای جریان مستقیم (DC) بود.[10]
کنترل برداری که قبلاً کنترل میدانی یا (FOC) نامیده میشد، یک روش کنترل درایو فرکانس متغیر (VFD) است که یک موتور الکتریکی AC سهفاز را با استفاده از دو متغیر خروجی اینورتر VFD کنترل میکند که عبارتاند از:
- اندازهٔ ولتاژ
- فرکانس (زاویهٔ ولتاژ، یا فاز فقط بهصورت غیرمستقیم کنترل میشوند.)
این روش در اصل برای کاربرد موتورهای با کارایی بالا توسعهیافته است که میتواند در سرعت نامی خود به نرمی کار کند و از طرفی در سرعت صفر با گشتاور کامل عمل کرده و شتاب بالای مثبت و منفی داشته باشد، ولی بهمرور برای کاربردهای با کارایی پایینتر باتوجهبه کاهش اندازه موتور FOC، هزینه و مصرف برق آن هم جذاب شد.
FOC در موتورهای القایی باتوجهبه کارایی بالای آنها هنوز خیلی همگانی نشده است ولی انتظار میرود در نهایت در همهجا جایگزین کنترل تک متغیر اسکالر ولت بر هرتز (V/f) شود.[11]
در این روش بردارهای جریان سهفاز به دو مرجع چرخشی (d-q) که با استفاده از تبدیل Clarke-Park به دست میآیند تبدیل میگردند. در این مرجع، مؤلفه d بیانگر فلاکس تولیدی توسط استاتور بوده و مؤلفه q گشتاور تولیدی میباشد.
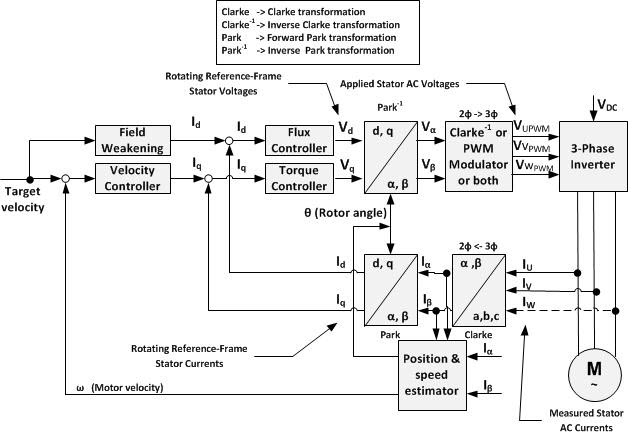
در این روش دو مؤلفه ذکر شده بهصورت مجزا و توسط کنترلرهای PI کنترل میشوند و در نهایت خروجی دو PI با تبدیل عکس پارک به سه رفرنس ساکن باز تبدیل میشوند.
قطعاً روش Vector Control نسبت به Scalar control از دقت سرعت و پاسخ گشتاوری مناسبتری برخوردار است ولی بههرحال دارای الگوریتم پیچیدهتر برای محاسبه سرعت و نیاز به تجهیزات کنترلی گرانتری میباشد.
کنترل مستقیم گشتاور (Direct Torque Control)
روش DTC برای اولینبار توسط Manfred Depenbrock در آمریکا و آلمان در سال 1984 (1363 ه.ش) به ثبت رسید، البته در آن زمان اصطلاح DTC رواج نداشت و به آن DSC که کوتاه شده direct self-control میبود در پتنت ثبت شد. در همان سال مقالهای مشابه در IEEJ به نام Isao Takahashi و Toshihiko Noguchi درج گردید که سرانجام در سال 1986 با عنوان “روشی جدید با امکان پاسخدهی بالا و بهینه جهت کنترل موتور القایی” در IEEE نیز مورد تأیید قرار گرفت.[12]
تنها تفاوت میان DTC و DSC، شکل مسیر بردار شار کنترل شده میباشد، این مسیر در مدل DSC به شکل شبه دایره است درحالیکه در DTC به دلیل بالاتر بودن فرکانس کلیدزنی به شکل یک ششضلعی ظاهر میشود. تفاوت دیگر در توان درایو میباشد، در DSC عمدتاً هدف درایوهای توان بالا میبود از سمت دیگر در DTC هدف بیشتر درایوهایی با توان متوسط موردنظر میباشند.[13]
تمرکز روش DTC بهصورت عمده بروی موتورهای سهفاز میباشد که در آنها با کنترل مستقیم گشتاور میتوانیم سرعت را نیز به نحوهٔ کنترل نماییم.
در DTC با اندازهگیری ولتاژ و جریان موتور محاسبات تخمین شار مغناطیسی صورت پذیرفته و در ادامه میتوانیم گشتاور را بر اساس دادههای بهدستآمده کنترل نماییم.
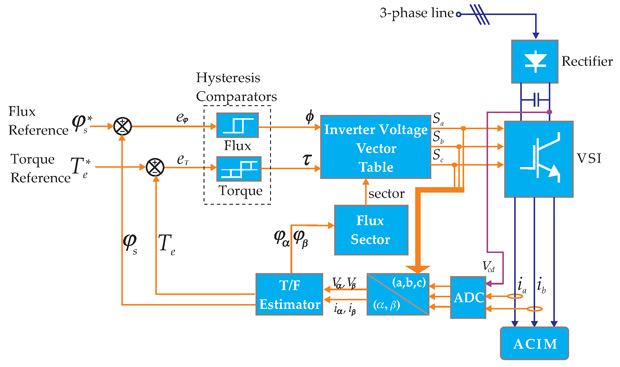
نحوه عملکرد DTC
عملکرد کنترل مستقیم گشتاور در شکل زیر بهخوبی بیان شده است، در ابتدا شار پیوندی استاتور با انتگرالگیری از ولتاژ استاتور محاسبه میگردد. گشتاور در این فرآیند یکی از نتایج تخمین بردار شار پیوندی و اندازهگیری بردار جریان میباشد. همان گونه که در شکل مشهود است سپس دامنه شار و گشتاور با مقادیر رفرنس که توسط ما تعیین میشوند مقایسه میگردند. اگر شار تخمینی و گشتاور از مقادیر مرجع (reference) فاصله زیادی داشته باشند، با خاموش و روش کردن ترانزیستورهای VFD میتوانیم آنها را به مقادیر مشخص شده نزدیک نماییم. باتوجهبه توضیحات داده شده Direct torque control یکی از روشهای هیسترزیس یا Bang-Bang کنترل میباشد.
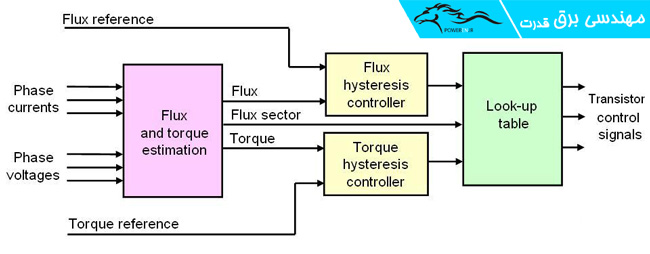
در DTC نیازی به مدولاتور و دورسنج یا اندکودر موقعیت برای بازخورد سرعت و مکان محور الکتروموتور نداریم. DTC از سریعترین نرمافزار پردازش سیگنال دیجیتال و فهم ریاضی پیشرفته در چگونگی کارکرد موتور استفاده میکند و حاصل درایوی با پاسخ گشتاوری است که معمولاً 10 مرتبه سریعتر از هر درایو AC یا DC است.
دقت سرعت دینامیک در درایوهای دی تی سی 8 مرتبه بیشتر از هر درایو AC حلقه باز میباشد. DTC تقریباً با یک درایو DC که از فیدبک استفاده میکند، قابلمقایسه خواهد بود. DTC بهنوعی اولین درایوی میباشد که قابلیت انجام کار هر دو درایو AC و DC را دارا میباشد.
| درایو | متغیرهای کنترل |
|---|---|
| درایوهای DC | جریان آرمیچر، جریان مغناطیسی |
| داریوهای PWM | ولتاژ خروجی، فرکانس خروجی |
| درایوهای DTC | گشتاور موتور، شار مغناطیسی موتور |
همان گونه که در جدول بالا مشخص است درایوهای DC و درایوهای DTC از پارامترهای حقیقی الکتروموتور برای کنترل گشتاور و سرعت استفاده میکنند بنابراین دارای عملکرد دینامیکی سریعتر و آسانی میباشند.
DTC برای اکثر کاربردها هیچ تاکومتر یا انکودری برای بازخورد سیگنال سرعت یا مکان نیاز ندارد
در درایوهای مدل PWM، متغیرهای کنترل، فرکانس و ولتاژ هستند که نیاز است مراحل متعددی را قبل از اعمال به الکتروموتور بگذرانند، بنابراین در این درایوها برخلاف DTC، کنترل در درون کنترلکنندهٔ الکترونیکی استفاده شده است، نه درون الکتروموتور، همین مسئله سبب افزایش پیچیدگی در PWM شده است.
دقت درایو DTC
برای DTC دقت سرعت 10 درصد لغزش الکتروموتور است. در یک موتور 11 کیلوولتی، 0.3 درصد برابر دقت سرعت استاتیک است (میزان خطا 0.3% میباشد). در یک موتور 110 کیلوواتی، دقت سرعت 0.1 درصد برابر حالت بدون انکودر (حلقه باز) است. این اعداد بیانگر دقت بسیار خوب DTC تا مرز 95% میباشد. بااینوجود، برای رسیدن به همان دقتی که درایوهای DC دارند، یک انکودر موردنیاز است. در مقابل در درایوهای PWM کنترلشدهٔ فرکانسی، دقت سرعت استاتیک معمولاً بین 1 تا 3 درصد است بنابراین پتانسیل بهبود فرآیند در درایوهای استانداردی که از تکنولوژی DTC استفاده میکنند، بالاتر است.
یک درایو DC که از یک انکودر با نسبت پالس/1024دور استفاده میکند، میتواند بهدقت سرعتی برابر با 0.01% درصد برسد!
بهصورت خلاصه مزایای استفاده از DTC بدین شرح است:
پاسخ سریع گشتاور: بهصورت قابلملاحظهای زمان افت سرعت را کاهش میدهد و درنهایت سبب افزایش بهرهوری کنترل فرآیند خواهد شد.
کنترل گشتاور در فرکانسهای پایین: بهصورت خاص برای بالابرها یا آسانسورها مفید است، جایی که نیاز است بار به طور منظم و بدون هیچگونه پرتابی، شروع به حرکت کرده و متوقف شود، همچنین با حضور یک پیچنده، کنترل تنش میتواند از سرعت صفر تا ماکزیمم به دست آید.
خطی بودن گشتاور: در کاربردهای دقیق مانند پیچندههای مورداستفاده در صنعت کاغذ، جایی که سطح دقیق و ثابت سیمپیچ مدنظر است، مهم است.
دقت سرعت دینامیک: بعد از یک تغییر ناگهانی در بار، الکتروموتور میتواند به یک وضعیت ثابت در کسری از ثانیه برسد.
صرفهجویی اقتصادی: در مقایسه با درایوهای وکتور شار PWM، DTC مزیت صرفهجویی در هزینه را به همراه میآورد چون به هیچ تاکومتری نیاز ندارد.

تکنولوژی Real time در درایو

خوشبختانه امروزه کنترل و مدیریت یک درایو بهآسانی و توسط چند کلیک ساده صورت میپذیرد، برخی از درایوها بهقدری هوشمند شدهاند که در کنار خود یک نرمافزار یکپارچه نیز به همراه دارند تا کاربر بتواند بهراحتی و بدون نیاز به زبان برنامهنویسی درایو خود را از صفر تا صد کنترل نماید.
علاوه بر این موارد بحث شبکه کردن درایوها نیز پیشرفت خوبی داشته است و شما میتوانید درایو را مستقیماً با یک HMI و یا حتی در تعامل با؛ PLC، PC، PAC، سیستم اسکادا و … کنترل نمایید.
انتخاب درایو مناسب موتور الکتریکی
به جهت تعیین سایز درایوهای فرکانس متغیر باید در ابتدا از مشخصات الکتروموتور (موتور الکتریکی) خود مطلع باشیم، در گام اول باید بدانیم موتور سهفاز است یا تکفاز که البته امروزه اکثر موتورهای الکتریکی در صنعت از نوع سهفاز هستند، هرچند درایوهای مخصوصی برای موتورهای سنکرون تکفاز هم وجود دارند بااینحال استفاده از این کنترل کنندهها توصیه نمیشود.
اگر برق سهفاز در دسترس نبود چه میتوان کرد؟
جای نگرانی نیست، برخی از درایوها میتوانند انرژی موتور سهفاز را برای شما تامین کنند، بهعنوانمثال میتوان از یک درایو با ورودی تکفاز 420 ولت برای تولید برق 3 فاز 230 ولت استفاده کرد.
اقدام بعدی که باید انجام دهید بررسی پلاک روی موتور است، این پلاک روی موتور نصب شده و اطلاعات مناسبی را شامل میشود که برای انتخاب درست و دقیق درایو نیاز داریم، یکی از این موارد میزان ولتاژ است که باید با ولتاژ درایو کاملاً یکسان باشند، همچنین جریان درایو انتخاب شده نباید از مقدار FLA که به معنی آمپر در بار کامل است کمتر باشد.

بهتر است که جریان درایو از مقدار آمپر با بار کامل موتور بالاتر باشد اما این مقادیر میتوانند یکسان هم باشند. آخرین موردی که باید بررسی شود، مقدار اضافهبار است، برخی از درایوها در دقیقه 110 درصد اضافهبار و بعضی دیگر 150 درصد اضافهبار یا حتی مقادیر متناوب دیگری را میتوانند تحمل کنند که با بررسی این موارد در نهایت میتوانید به انتخاب درست درایو اقدام نمایید.
مزایای درایو
در مورد درایو صحبتهای زیادی شد در این بخش بهصورت لیست وار به مزایا و سپس معایب استفاده از درایو AC خواهیم پرداخت.
- عمر مفید بالا (به دلیل استفاده از مدارات الکترونیک قدرت).
- توانائی درایو در بازگرداندن انرژی مصرفی در ترمزهای مکانیکی به شبکه.
- کاهش جریان راهانداز کشیده شده از شبکه (جریان راهاندازی کمتر از 10 درصد جریان نامی میشود).
- کاهش مصرف انرژی در سیستمهای دارای فن (درگذشته با وجود موتورهای دور ثابت، کنترل جریان سیال با دمپرها صورت میگرفت).
- کاهش تنشهای الکتریکی (به دلیل راهاندازی و توقف نرم موتور الکتریکی) و در پی آن کاهش تنشهای مکانیکی، این مسئله باعث کاهش هزینههای تعمیر و نگهداری نیز میشود.
- افزایش دامنه تغییرات ممکن برای سرعت، توان و گشتاور موتور الکتریکی.
- امکان تغییر جهت چرخش موتور الکتریکی، ترمز الکتریکی، گیربکس و مدهای متفاوت کاری (4 ناحیه کاری).
- حفاظت الکتریکی موتور در برابر خطاهای؛ اضافه ولتاژ، اضافه جریان، بار بیش از حد و …
- اضافهشدن امکانات نرمافزاری برای مدیریت عملکرد کنترل از راه دور، ایجاد طرحهای دورهای، شخصیسازی و …
- بهبود محیطزیست به دلیل کاهش چشمگیر مصرف انرژی توسط موتور الکتریکی (گاهاً بیش از 50%)
- عدم نیاز به سوختگیری و پیشگرمایش (Preheating)، میتوانند فوراً راهاندازی و بارگیری شوند.
- عدم تأثیرپذیری از محیط کاری.
معایب درایو
- هزینه ابتدایی همچنان بالاست.
- در مدلهای ارزان پاسخ دینامیکی ضعیف میباشد.
- سبب تولید سروصدا و نویز میگردند.
- به دلیل استفاده از الکترونیک قدرت نسبت به نوسانات برقی آسیبپذیر میباشند.
سؤالات متداول درایو
وظیفه اصلی یک درایو چیست و آیا درایو صرفاً برای موتور AC هست؟
تفاوت یک درایو با سافت استارتر (Motor soft starter) چیست؟
انواع متد کنترل درایو را نامبرده و بگویید کدام بهتر است و چرا؟
چرا به DTC کنترل مستقیم گشتاور میگویند؟
تفاوت عملکرد PWM و DTC در چیست؟
منابع
-
B.S.Iakobi, “Lyudi nauki (Russian) Paperback”, Prosveshenie Moskva, 1978 ↑
-
M.A. Gundersen, “Research issues for new applications of power modulators”, DOI: 10.1109/MODSYM.1996.564438, Jun 1996 ↑
-
Stephen Herman, “Industrial Motor Control”, Delmar Cengage Learning, 2009 ↑
-
International Energy Agency, Key World Energy Statistics 2007 ↑
-
Paes, Richard, “An Overview of Medium Voltage AC Adjustable Speed Drives and IEEE Std. 1566 – Standard for Performance of Adjustable Speed AC Drives Rated 375 kW and Larger”, Joint Power Engineering Society – Industrial Applications Society Technical Seminar, June 2011 ↑
-
Ned Mohan, “Power Electronics: A First Course“, Wiley, Nov 2011 ↑
-
Carrow, Robert S, “Electrician’s Technical Reference: Variable Frequency Drives”, Albany, Apr 2000 ↑
-
Barr. Michael, “Introduction to Pulse Width Modulation (PWM)“, Barr Group, Sep 2001 ↑
-
کریم عباسزاده، “الکترونیک قدرت (تحلیل و طراحی)”، دانشگاه صنعی خواجه نصیرالدین طوسی، مهر 1393 ↑
-
Yano. Masao, et al, “History of Power Electronics for Motor Drives in Japan“, Apr 2012 ↑
-
Murray, Aengus, “Transforming motion: Field-oriented control of ac motors“, EDN, May 2017 ↑
-
Toshihiko Noguchi, Isao Takahashi, “A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor“, IEEE Transactions on Industry Applications, DOI: 10.1109/TIA.1986.4504799, Sep 1986 ↑
-
Foo, Gilbert, “Sensorless Direct Torque and Flux Control of Interior Permanent Magnet Synchronous Motors at Very Low Speeds Including Standstill (Thesis)“, Sydney, Australia: The University of New South Wales, 2010 ↑
خوشحال خواهیم شد اگر شما نکته و یا تجربهای در مورد درایو الکتریکی داشتهاید با ما در بخش نظرات در میان بگذارید
راستی! برای دريافت مطالب جديد در پیج اینستاگرم PowreEn عضو شويد.








hadydywany99@gmail.com
سلام جناب مهندس . یه سوال داشتم. ایا لازم هست که در کنار پی ال سی ، درایو رو هم بلد باشیم؟
سلام
کلا توی حوزه اتوماسیون هرچی بیشتر کار کنید بد نیست
سلام .مطالب فوق العاده است
یک دوره برای درایو های صنعتی آماده نمیکنید
ممنون
سلام
حتما وقت بود میریم
تشکر
موفق باشید
سلام ممنون استفاده کردیم مطالب عالی بود
سلام
خوشحالم مفید بوده واستون، موفق باشید
مهندس ميشه در مورد تله كنترل هم مقاله اى بنويسيد ؟
ممنون ميشم
عالی
ممنون