ماشین سنکرون (Synchronous Machine) چیست
-
آپدیت شده در :

ماشین سنکرون یکی از بنیادیترین ماشینها در صنعت برق میباشد چرا که نوع ژنراتوری آن را میتوان هسته اصلی تولید برق در جهان و نوع موتوری آن را یک موتور دقیق و کارآمد دانست.
در این پست اختصاصی میخواهیم به این ماشین که تفاوت عمده آن با ماشین القایی در تحریک آن بوده و نحوه عملکرد آن که حول میدان مغناطیسی ایجاد شده توسط ولتاژ DC میباشد و تاریخچه آن که از زمان تسلا آغاز میشود بپردازیم، پس از آن به کاربردهای این ماشین محبوب در زمینههای جانبی مانند توان راکتیو پرداخته میشود و نگاهی به ساختار آن که عمدتاً حول روتور در دو نوع برجسته و استوانهای میباشد و در ادامه به انواع ماشین سنکرون که میتوانیم در دو دستهبندی اصلی بدون تحریک و با تحریک DC تقسیم نماییم خواهیم پرداخت.
موضوع را با روشهای راهاندازی ماشین سنکرون که یکی چالشهای اساسی این ماشین میباشد پیش خواهیم برد و پس از این موارد وارد معادلات بنیادی خواهیم شد تا به شما نحوه محاسبه؛ توان P، توان Q، زاویه گشتاور و عملکرد آن را آموزش دهیم. همان گونه که میدانید بزرگترین ویژگی خاص موتور سنکرون کنترل ضریب توان آن میباشد به همین دلیل به شکلی خاص به تاثیر جریان تحریک در Power Factor خواهیم پرداخت و برای اینکه دید خوبی از آنچه تاکنون گفته شده، داشته باشیم نگاهی کلی به مزایا و معایب ماشین سنکرون خواهیم داشت.
سپس به یکی از سؤالات مهم شما که شین بینهایت چیست پاسخ خواهیم داد و برای تفکیک بهتر ماشین القایی و ماشین سنکرون به مقایسه دقیق و جزئی آنها از نوع آنها تا نحوه راهاندازی آنها خواهیم پرداخت.
در پایان نیز موتور سنکرون سهفاز را در نرمافزار سیمولینک متلب بهصورت مرحله به مرحله و با یکدیگر جهت یادگیری بیشتر شبیهسازی خواهیم نمود.
آنچه که در این نوشتار خواهید خواند:
- تحریک ماشین سنکرون و القایی
- موتور سنکرون و ژنراتور سنکرون
- ماشین سنکرون چگونه کار میکند
- تاریخچه ماشین سنکرون
- کاربرد ماشین سنکرون
- ساختار ماشین سنکرون
- انواع ماشین سنکرون
- روشهای راهاندازی ماشین سنکرون
- معادلات ماشین سنکرون
- کنترل ضریب توان موتور سنکرون
- مزایای ماشین سنکرون
- معایب ماشین سنکرون
- شین بینهایت
- تفاوت ماشین سنکرون و آسنکرون
- شبیهسازی ماشین سنکرون در سیمولینک متلب
- سؤالات متداول ماشین سنکرون
- منابع
قبل از ورود به بررسی اجازه دهید کار را با دیدن یک کلیپ کوتاه در مورد معرفی ماشین سنکرون شروع نماییم، بدین ترتیب شما را به دیدن این کلیپ کوتاه که توسط تیم PowerEn به فارسی ترجمه و زیرنویس شده است دعوت مینمایم.
دانلود فیلم موتور سنکرون چیست – Full HD | با حجم 44 مگابايت
اگر بخواهیم در یک پاراگراف ماشین سنکرون را تعریف کنیم به این صورت خواهد بود:
ماشین سنکرون همواره در سرعتی مشخص بدون درنظرگرفتن شرایط بار مکانیکی آن (حالت موتوری) و فرکانس مشخص بدون درنظرگرفتن بار الکتریکی آن (حالت ژنراتوری) عمل خواهد نمود.
منظور از سرعت ثابت در حالت موتوری آن است که در صورت تغییر میزان بار مکانیکی روی شفت، سرعت گردش موتور تغییر نخواهد کرد (در این ماشینها برخلاف ماشینهای القایی، سرعت چرخش میدان گردان شکاف هوایی و روتور یکی بوده و آن را سرعت سنکرون می نامیم). در واقع این سرعت ثابت همان سرعت میدان مغناطیسی دوار ترکیبی حاصل شده از برهمکنش میدانهای مغناطیسی سیمپیچهای استاتور و روتور میباشد.[1]
پس از ظهور ماشینهای القایی، صنعت به شکل وسیعی توسعه یافت و رفتهرفته نیازهای جدید صنعت بیشتر از قبل بهدقت و ثبات محتاج شد و ازآنجاییکه ماشینهای سنکرون میتوانستند در سرعتی ثابت و مثالزدنی نسبت به ماشین القایی کار کنند به یکباره مورد توجه قرار گرفتند.
احتمالاً سؤالی برایتان شکلگرفته که این تفاوت عمده میان ماشین القایی و ماشین سنکرون از کجا نشئت میگیرد؟
پاسخ به این سؤال ساده است: «تفاوت در تحریک آنها»؛ بنابراین اجازه دهید در ادامه نگاهی کوتاه و مختصر به تحریک این دو ماشین در گذر زمان داشته باشیم.
تحریک ماشین سنکرون و القایی
در اوایل قرن بیستم به این واقعیت پی برده شد که ماشین القایی بعد از قطع ولتاژ خط ممکن است در حالت تحریک باقی بماند ولی برای ایجاد چنین تحریکی شرایط خاصی مورد نیاز بود. محققان پس از پژوهش و تحقیق دریافتند که با اتصال خازنهایی به ترمینال ماشین القایی در حال چرخش (ژنراتور القایی) شرط تحریک پایدار به وجود آمده و ولتاژ به طور پیوسته تولید میشود؛ بنابراین یک سیستم تولیدی جدید متولد شد که در آن ولتاژ خروجی شدیداً به مقدار خازن تحریک، سرعت روتور و بار بستگی داشت. این روش تولید در سالهای 1960-1970 به فراموشی سپرده شد و مطالب کمی در مورد آن نوشته شده است.
علت این بیتوجهی در اهمیت عملی و بازده پایین این روش میبود. چرا که ژنراتور القایی بهتنهایی توانایی کنترل ولتاژ و فرکانس تولیدی را ندارد. ازاینرو پس از آنها ژنراتورهای سنکرون در اکثر نیروگاهها بکار گرفته و هرساله مقدار زیادی سوخت صرف تولید برق AC گشت. طبیعی است با استفاده روزافزون از آلترناتورهای سنکرون، آنها از نظر مقادیر نامی، روشهای خنکسازی، تکنولوژی ساخت و مدلسازی دستخوش رشد و تحول شدند، اما ساختار اساسی آنها بدون تغییر ماند. بااین حال به دلیل نگرانی از کاهش شدید منابع انرژی تجدیدناپذیر و به طبع آن صعود چشمگیر قیمت نفت ازیکطرف و ظهور و رشد قطعات نیمههادی قدرت بخصوص رکتیفایر و اینورتر و از طرف دیگر پیشرفت کنترل صنعتی ژنراتور القایی بازگشتِ مجددی یافت.
واژه «آلترناتور» را میتوان برای هر نوع ژنراتور الکتریکی استفاده نمود، بااینحال این واژه عمدتاً برای دستگاههای دوار کوچک که توسط احتراق درونی (خودرو) به چرخش درمیآیند استفاده میگردد.
ازاینرو علاقهمندی زیادی برای استفاده از انرژیهای تجدیدپذیر، مثل باد جهت جایگزینی سوخت و کاهش نرخ مصرف سوخت ایجاد شده و توجه به ژنراتور القایی با توجه به مزایای زیاد آن بیشتر شد.
در سالهای اخیر کاربرد ژنراتور القایی در تولید برق از توربین بادی و توربین آبی کوچک مورد توجه زیادی قرار گرفته است. چرا که سادگی نگهداری و کاهش منابع انرژی فسیلی و توانایی ژنراتور القایی برای تولید برق از سرعت های متفاوت چرخشی، موجب شده تا به فکر جایگزینی انرژی باد بهجای سوختهای فسیلی بیافتند و انبوه تحقیقات در این زمینه نشانگر توانایی آن در رفع مشکلات حاضر میباشد.

هرچند که در این سالها ژنراتورهای القایی اندکاندک کنار رفته و بجای آنها ماشینهای شار محور آهنربای دائم استفاده میشوند.
همانطور که میدانیم تولید انرژی الکتریکی بر اساس قطع شدن خطوط قوا بهوسیله هادیها میباشد که درنهایت سبب تولید ولتاژ میگردد؛ بنابراین در سادهترین فرم آن چنانچه یک آهنربای قوی را در داخل یک سیمپیچ و یا یک سیمپیچ را در داخل یک آهنربا به چرخش در آوریم سبب قطع خطوط قوای مغناطیسی توسط سیمپیچ می شویم، در این حالت می توان ادعا کرد که یک مولد الکتریکی ساختهایم.

عاملی که باعث تبدیل این قدرت مکانیکی به قدرت الکتریکی میگردد، میدان مغناطیسی روتور است، بنابراین اگر به دلائلی میدان مغناطیسی روتور بیش از حد تضعیف شـود و یا بهطورکلی قطع گردد، قدرت مکانیکی تبدیل به قدرت الکتریکی نمیشود و انرژی آن صرف بالا بردن سرعت روتور شده بهطوریکه آن را از سرعت سنکرون خارج کرده و به شدت دور برمیدارد که خسارات کلی و جبرانناپذیری به ژنراتور وارد خواهد نمود.
پس نتیجه میگیریم در مقابل یک مصرف مشخص (قدرت واته اخذشده بهوسیله شبکه از ژنراتور ما) یک مقدار مشخصی قدرت مکانیکی از طرف توربین یا دیزل باید به محور ژنراتور (روتور) انتقال یابد و از طرف دیگر شدت میدان مغناطیسی در روتور باید برای تبدیل انرژی مناسب باشد زیرا همانطور که در یک ترانسفورماتور، هسته آهنی عامل انتقال انرژی از اولیه به سمت ثانویه میباشد، در ماشین سنکرون نیز میدان مغناطیسی روتور بهعنوان پلی است که در یک طرف آن انرژی مکانیکی و در سمت دیگر آن انرژی الکتریکی حضور داشته و بهواسطه این پل این دو تبدیل به هم انجام میشود. به دلیل اهمیت این پل، این واسطهها (میدان مغناطیسی در ماشین و هسته آهنی در ترانس) باید مستحکم و مناسب باشند.
ماشینهای سنکرون اعم از موتور و ژنراتور جزء ماشینهای دو تحریکه (Doubly Excited) محسوب میشوند، زیرا سیمپیچ رتور آنها توسط منبع DC و سیمپیچ استاتور آنها توسط منبع AC تغذیه میگردد.
با توجه به موارد گفته شده تفاوت اساسی ماشین سنکرون و القایی در نحوه ایجاد و کیفیت این پل مغناطیسی میباشد، و ازآنجاییکه کیفیت این واسطه در ماشین سنکرون از بیرون و توسط ما تعیین میگردد میتوانیم انتظارات خاصی مانند داشتن سرعت ثابت در حالت موتوری و یا فرکانس ثابت در حالت ژنراتوری از این ماشین داشته باشیم.
امروزه ژنراتورهای سنکرون ستون فقرات شبکههای برق را در جهان تشکیل میدهند
دکتر پ. س. سن
دانلود فیلم موتور سنکرون چیست – Full HD | با حجم ۹۷ مگابايت
موتور سنکرون و ژنراتور سنکرون
هدف ما در این پست بیشتر توضیح ماشین سنکرون (موتور/ژنراتور) میباشد و البته قسمتهایی وجود خواهد داشت که دقیقاً به نوع آن یعنی موتور و یا ژنراتور در صورت نیاز اشاره خواهیم نمود، بااینحال اجازه دهید نگاهی کوتاه به تفاوت آنها داشته باشیم.
اگر از ژنـراتور بار سهفاز متعـادل بگـیریم یک میـدان دوار در داخـل اسـتاتور ایجاد میشود که با همان سرعتی که روتور در حال گردش است میدان نیز آن را تعقیب میکند.
بنابراین، این دو میدان دارای فرکانس یکسانی هستند ولی بین آنها اختلاف فازی برابر δ وجود دارد که آن را زاویه توان یا زاویه گشتاور (Power-Tourque angle) گویند. زاویه گشتاور در ژنراتورها بین 0 تا 90 درجه میتواند تغییر کند (در حالت ژنراتوری اگر این زاویه بیش از 90 درجه باشد ژنراتور ناپایدار خواهد شد) تغییر کند ولی در موتورهای سنکرون این زاویه بین 0 و 90- درجه میباشد (در حالت موتوری اگر این زاویه کمتر از 90- درجه باشد موتور ناپایدار خواهد شد).
در ژنراتور، میدان مغناطیسی دوار روتور است که میدان مغناطیسی دوار را در استاتور (در صورت زیر بار بودن ژنراتور) به وجود میآورد، لذا این میدان جلوتر از میدان دوار استاتور در حال چرخیدن است یعنی میدان مغناطیسی روتور، میدان دوار استاتور را به دنبال خود میکشد. در حالت موتوری (موتور سنکرون) این وضعیت برعکس است.
ماشین سنکرون چگونه کار میکند
این بخش را میتوان به دو شکل مجزا در قالب ژنراتور و موتور توضیح داد، هدف از این قسمت آشنایی اجمالی با نحوه عملکرد ماشین سنکرون میباشد تا بتوانیم در ادامه اطلاعات مفیدتری را در اختیار شما عزیزان قرار دهیم.
دانلود فیلم ژنراتور سنکرون چیست – Full HD | با حجم ۷۰ مگابايت
نحوه عملکرد ژنراتور سنکرون
در ابتدا جریان مستقیم “DC” توسط ما به سیمپیچ روتور ژنراتور سنکرون تزریق میشود تا یک میدان مغناطیسی اطراف روتور ایجاد نماید. ازآنجاییکه این روتور بهوسیله یک نیروی خارجی (توربین) به چرخش در میآید بنابراین یک میدان مغناطیسی چرخان در درون ژنراتور شکل خواهد گرفت.
این میدان چرخان در هر لحظه در حال قطع هادیهای قرار گرفته در استاتور میباشد به همین دلیل انتظار القای ولتاژ سهفاز متعادل در سیمپیچهای استاتور امری دور از ذهن نیست. در این مسیر هرچقدر سرعت چرخش روتور بیشتر باشد، فرکانس و میزان برق تولید شده توسط ژنراتور سنکرون هم بیشتر میشود.
نحوه عملکرد موتور سنکرون
مسلماً در حالت موتوری شرایط برعکس حالت ژنراتوری میباشد یعنی بهصورت کلی در این بخش ما به روتور و استاتور ولتاژ تزریق میکنیم و از سوی دیگر انتظار ایجاد نیروی چرخشی را داریم.
هنگام وصل استاتور به شبکه سهفاز (AC)، یک میدان دوار مغناطیسی که سرعت آن متناسب با فرکانس شبکه و تعداد قطبهای استاتور است در آن به وجود آمده و شروع به جاروب نمودن سطح روتور مینماید.
در این حالت (قبل از آنکه به روتور ولتاژ DC اعمال نماییم) قطبهای روتور از طریق قطبهای غیر همنام استاتور جذب و لحظهای بعد مجدداً این قطبها بهوسیله قطبهای همنام استاتور دفع خواهند شد. پس میانگین گشتاور صفر بوده و روتور حرکت نمیکند از طرف دیگر قطبهای روتور به دلیل سنگینی و اینرسی موجود در آن نمیتوانند بهسرعت همراه میدان دوار استاتور بچرخند. پس باید به طریقی (راهانداز) ابتدا سرعت روتور را به نزدیکی سرعت میدان دوار استاتور رسانده و در آن حین انتظار همگام شدن رتور با استاتور را داشته باشیم.
پس از استفاده از روشهای راهانداز مانند؛ مبدل فرکانسی، استارت به شکل موتور القایی، سیمپیچهای میراکننده و … در این حالت اگر همه چیز مناسب باشد روتور موتور ما با سرعت سنکرون (سرعت دوار میدان مغناطیسی استاتور) به چرخش در خواهد آمد. در ادامه در مورد راهاندازها مفصلاً توضیح خواهیم داد.
اگر در هنگام کارکرد موتور، بار را افزایش دهیم چه خواهد شد؟
در موتورهای سنکرون سرعت حرکت روتور درهرحال برابر با سرعت میدان دوار استاتور خواهد بود و افزایش بار فقط عقبماندگی روتور نسبت به میدان را موجب میشود. اختلاف فاز این دو میدان، (Bs و BR) همان زاویه گشتاور است.
اگر افزایش بار در ماشین سنکرون بیش حد باشد؛ ماشین از حالت سنکرونیزم خارج خواهد شد که اصطلاحاً آن را ناپایدار مینامیم
تاریخچه ماشین سنکرون
شاید جالب باشد دوره تاریخی تولید برق AC کهنتر از تولید برق DC میباشد، برق AC برای اولینبار توسط ژنراتور در سال 1830 (1209 ه. ش) تولید شد. البته به خاطر ماهیت متناوب آن کاربرد خاصی نداشت و به همین دلیل رفتهرفته تولید برق DC رونق گرفت.[2]
بهصورت طبیعی برق تولیدی حاصل از چرخش، همواره متناوب (AC) میباشد.
در ابتدا نخستین ماشینها توسط مایکل فارادی (1791-1867) و (Hippolyte Pixii (1808-1835 توسعه داده شدند.
مهمترین کار فارادی توسعه مدل “rotating rectangle” بود که در آن هر هادی به شکلی ناهمگن و بهدرستی از منطقهای که در آن میدان مغناطیسی وجود داشت (در جهتی عکس) عبور داده میشد (قانون القای فارادی). [3]
پس از فارادی نوبت به کلوین (1824-1907) و سباستین د فرانتی (1864-1930) رسید تا ژنراتورهای اولیه را توسعه داده و فرکانس تولیدی را به 100 تا 300 هرتز برسانند.
پس از رقابت شدید نیکولا تسلا و ادیسون جامعه جهانی دریافت که لامپهای ساخته شده در آن زمان با ولتاژ متناوب عملکردی بهتر خواهند داشت و از سوی دیگر میتوان الکتریسیته تولیدی را بهراحتی برخلاف محدودیتهای ذاتی DC تا کیلومترها انتقال داد. همین مسئله سبب افزایش درخواست برای ژنراتورهای AC گشت.[4]
در آن سالها جهان وارد یک رالی تولید برق AC شده بود و مهندسین در سرتاسر دنیا سعی میکردند ژنراتوری بسازند که بتواند برق بیشتری نسبت به نمونههای قبلی خود تولید نماید[5]
این تب داغ با ظهور ترانسفورماتور به یکباره شعلهور شد و بیشازپیش تقاضا برای افزایش راندمان ژنراتورها سرعت گرفت (1880 تا 1890).[6]
این توسعه بهقدری سریع بود که در سال 1891 برای نخستینبار سیستمهای چند فازی مطرح گردیدند. از آن پس سیستمهای متفاوتی در رنجهای فرکانسی مختلف از 16 تا 100 هرتز برای کاربردهای مختلفی نظیر؛ روشنایی آرکی، روشنایی رشتهای و موتورهای الکتریکی ساخته شد. (3)

پیشرفتهای حوزه فرکانسی بهقدری سریع بود که در دوران جنگ جهانی اول نخستین ژنراتور فرکانس بالا به نام Alexanderson alternator جهت انتقال پیامهای رادیویی طراحی گردید.[7]
تاریخچه ژنراتور بهصورت کلی متعلق به ژنراتورهای سنکرون میباشد نه مدل القایی آن، به این دلیل که در تمام این سالها همواره فرکانس ولتاژ تولیدی مدنظر بوده و این مشخصه (کنترل فرکانس) یکی از مهمترین ویژگیها در ماشینهای سنکرون میباشد.
کاربرد ماشین سنکرون
بهصورت کلیدی مهمترین ویژگی ماشین سنکرون (بخصوص موتور آن) داشتن سرعت ثابت میباشد و به همین دلیل در اکثر کاربردهایی که در آنها بهسرعت ثابت (پخشکننده دیسک و …) و دقت بالا (رادار و …) نیاز داریم از این نوع ماشین استفاده میگردد.
کاربرد دیگر موتور سنکرون در راستای جبران سازی توان راکتیو، برای اصلاح Cos φ است. در این حالت معمولاً باری بروی موتور قرار نگرفته و یا درصورتیکه باید موتور تحت بار عمل نماید آن را در مد «پرتحریک» قرار میدهند، در این شرایط موتور سنکرون علاوه بر انجام تبدیل انرژی الکتریکی به انرژی جنبشی در نقش یک خازن نیز در شبکه فعالیت خواهد نمود.
یکی دیگر از ویژگیهای خوب این ماشین، سوئیچ ساده و سریع از حالت موتوری به حالت ژنراتوری میباشد، به همین دلیل از ماشینهای سنکرون در نیروگاههای آبی تلمبهای استفاده میشود چرا که این ماشینها بهراحتی میتوانند نقش ژنراتور را ایفا کنند و بهاینترتیب در ساعات کممصرف، ماشین الکتریکی بهصورت موتور عمل کرده و آب را به مخزن با ارتفاع بالا پمپ کرده و سپس در ساعات پر مصرف با پایین آمدن آب بهصورت ژنراتور عمل کرده و از شبکه پشتیبانی کنند.

نیروگاه تلمبهای ذخیرهای سیاهبیشه که به نام نیروگاه سیاهبیشه نیز شناخته میشود یک نیروگاه برقآبی در دامنههای البرز و در مجاورت روستای سیاهبیشه بوده که در آن از ژنراتورهای سنکرون باقدرت 260 مگاوات استفاده شده است.[8] این نیروگاه تلمبه ذخیرهای هنگامیکه تقاضای انرژی بالاست، برق تولید میکند و به عبارتی یک نیروگاه قلهای است که در زمانهای بیشینهٔ مصرف، انرژی لازم برای تهران را (که در فاصله ۶۰ کیلومتر (۳۷ مایل) جنوب آن قرار دارد) تأمین میکند.[9]
ساختار ماشین سنکرون
استاتور ماشینهای سنکرون سهفاز (اعم از ژنراتور و موتور) حاوی سیمپیچی سهفازی است که درون شیارهای استاتور جاسازی شده و در طول محیط آن پخش و توزیع گردیدهاند. استاتور ماشینهای سنکرون سهفاز شبیه ماشینهای القایی سهفاز است. استاتور در ژنراتور بار را تغذیه میکند و در موتور سنکرون به شبکه وصل میشود تا جریان به درون موتور سرازیر شود. در هر دو حال جریان استاتور یک جریان AC است.
به سیمپیچی استاتور در ماشین سنکرون سیمپیچی آرمیچر نیز گفته میشود و این امر برخلاف ماشینهای DC است
برخلاف ماشین سنکرون در ماشینهای DC سیمپیچی آرمیچر بروی رتور قرار دارد. سیمپیچی استاتور یا آرمیچر در فرآیند طراحی ماشین به گونهای طراحی میشوند که جریان و ولتاژ زیادی را تحمل نمایند.
رتور ماشینهای سنکرون حاوی سیمپیچ تحریک یا سیمپیچی میدان است و این سیمپیچی توسط جریان DC تحریک میگردد.
رتور در این ماشینها بر دو نوع است:
رتور قطب برجسته
این نوع رتورها عمدتاً در ماشینهایی به کار میرود که سرعت سنکرون آنها کم است.
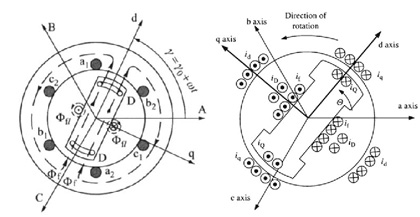
همانطور که اشاره شد ماشینهای سنکرون چندقطبی و کمسرعت حاوی قطبهای برجسته هستند. در این ماشینها سرعت سنکرون کم است و با شکاف هوایی غیریکنواخت روبهرو هستیم؛ لذا عکسالعمل آرمیچر یا mmf آرمیچر، شار بیشتری در امتداد محور قطبها که به محور مستقیم (direct axis) یا محور d معروف است، تولید میکند. علت این امر آن است که طول شکاف هوایی در این امتداد بسیار کم است. پرواضح است که عکسالعمل آرمیچر یا mmf آرمیچر شار کمتری در امتداد محور متعامد که به محور عرضی (quadranture) یا محور q معروف است، تولید میکند. زیرا طول شکاف هوایی در این امتداد نسبتاً زیاد است. در ماشینهای استوانهای، شار در کلیه نقاط شکاف هوایی یکسان است، زیرا در این ماشینها شکاف هوایی یکنواخت میباشد. درنتیجه راکتانس Xar که مدل عکسالعمل آرمیچر در ماشینهای با رتور استوانه ایست، دیگر جهت مدلسازی عکسالعمل آرمیچر در ماشینهای قطب برجسته قابلقبول نخواهد بود.
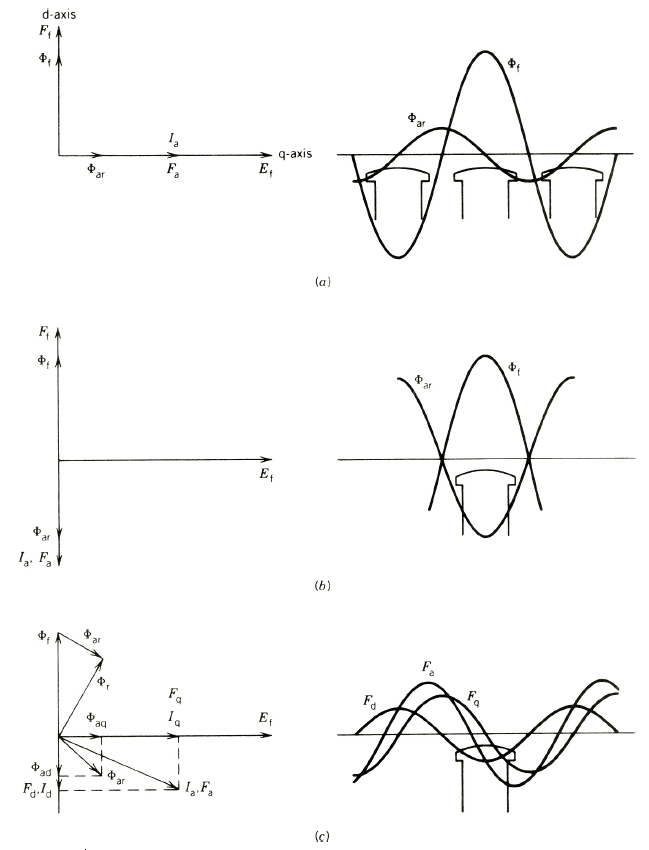
شکل (1-a) را در نظر میگیریم که در آن جریان آرمیچر با Ef هم فاز است. mmf ناشی از میدان قطبها (تحریک) یا Ff و شار وابسته به آن یعنی фf در امتداد محور d عمل میکنند. mmf آرمیچر یا Fa و شار وابسته به آن фar در امتداد محور q عمل مینمایند. باید دانست طبق قانون فارادی اگر میدان رتور در جهت محور d باشد، ولتاژ Ef در امتداد محور q خواهد بود. در شکل (1-b) فرض بر آن است که جریان آرمیچر به میزان 90 درجه از Ef عقب است. در این شرایط Fa و фar در امتداد محور d عمل میکنند، اما جهت آنها مخالف Ff و фf است. گیریم Fa در هر دو شکل (1-a) و (1-b) یکسان باشد. باید دانست در شکل (1-a) چون Fa در امتداد محور q عمل میکند، شار عکسالعمل آرمیچر کمتر خواهد بود، زیرا در امتداد محور q طول شکاف هوایی بیشتر است. در شکل (1-b) چون Fa در امتداد محور d عمل میکند، شار عکسالعمل آرمیچر بیشتر خواهد بود زیرا در امتداد محور d طول شکاف هوایی کمتر است؛ لذا راکتانسی که عکسالعمل آرمیچر را مدل مینماید دیگر یک راکتانس واحد نخواهد بود.[10]
رتور استوانهای یا غیربرجسته
این نوع رتورها عمدتاً در ماشینهایی به کار میرود که سرعت سنکرون آنها زیاد است و ازآنجاییکه فاصله هوایی در این نوع ماشین بهصورت کامل یکنواخت و برابر میباشد به همین دلیل محاسبات در این نوع ماشین سادهتر از حالت برجسته است. نمونه بسیار خوب برای این دسته نیروگاههای بخار و بهصورت کلی نیروگاه سیکل ترکیبی میباشد.
انواع ماشین سنکرون
درست است که ساختار موتور و ژنراتور سنکرون مشابه هم میباشند بااینحال موتور سنکرون برای استارت نیاز به راهانداز دارد درحالیکه این مسئله در حالت ژنراتوری آن عملاً وجود ندارد؛ بنابراین یکی از مهمترین دستهبندیهای موتور سنکرون به نحوه مگنتایز نمودن روتور موتور مرتبط میباشد؛ بدون تحریک و تحریک دیسی.[11]
موتور بدون تحریک
در این نوع موتورها جنس رتور؛ استیل و کوبالت میباشد و همین مسئله سبب میشود تا در زمانی که در معرض میدان مغناطیسی استاتور قرار میگیرند مغناطیسی شده و در درون خود حاوی یک میدان مغناطیس ثابت میگردند، این میدان مغناطیسی ایجاد شده در روتور با میدان مغناطیسی استاتور که با سرعت سنکرون در حال چرخش است کوپل شده و درنهایت سبب چرخش روتور با سرعت سنکرون خواهد شد.
ماشینهای این دسته عبارتاند از؛ ماشین آهنربای دائم، رلوکتانسی و هیسترزیس.
موتور رلوکتانسی
روتور دو قطب نشان داده شده در شکل زیر را در نظر بگیرید. اگرچه در این روتور حجم نسبتاً زیادی به سیمپیچ de اختصاص داده شده است، بااینحال بدون این سیمپیچی نیز روتور در سرعت سنکرون راهاندازی میشود.
مشابه جریان الکتریکی که از مسیری با حداقل مقاومت الکتریکی عبور میکند، شار مغناطیسی نیز تمایل به عبور از مسیر با حداقل مقاومت مغناطیسی را دارد.
اگر این روتور در یک میدان دو قطب چرخان قرار گیرد، تحت اثر گشتاور القایی شتاب میگیرد، درصورتیکه اینرسی بار زیاد نباشد روتور تحت اثر گشتاور رلوکتانسی (که به دلیل تمایل قطبهای روتور برای همسویی با میدان چرخان ایجاد میشود) در سرعت سنکرون قفل میشود. میتوان گفت به این دلیل شار، مسیر طولی قطبها را انتخاب میکند که نسبت به مسیر عمودی فاصله هوایی کوچکتر و در نتیجه رلوکتانس (Reluctance) کمتری دارد، دقت داشته باشید که روتور با گشتاور اولیه ایجاد شده نمیتواند بچرخد و درنهایت به دلیل میلههای اتصال درون روتور این چرخش شکل میگیرد (راهاندازی بهصورت موتور القایی).[12]
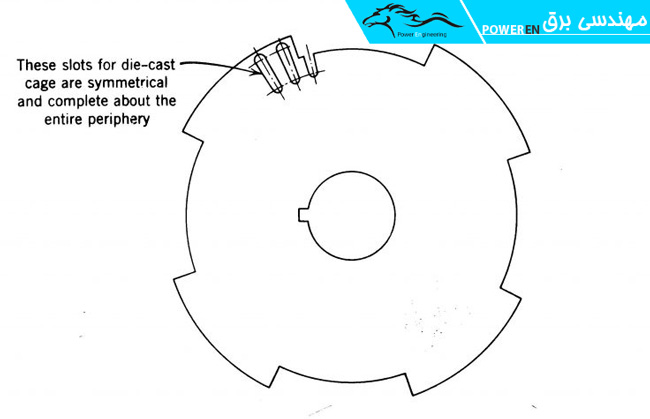
در شکل مذکور یکلایه از یک روتور چهار قطب نشان داده شده است. همانطور که دیده میشود، برای تشکیل قطبها چهار قسمت از محیط آن به طور متقارن برش داده شده است. سوراخهای مخصوص نصب میلههای القایی (که در شکل فقط دوتای آنها دیده میشود) در تمامی محیط روتور به طور یکنواخت وجود دارد.
برای ساختن روتور، تعدادی از این لایهها بر روی یکدیگر و درون یک قالب قرار داده میشوند، و همانند روتورهای قفس سنجابی معمولی به آنها آلومینیم تزریق میکنند. سپس چهار بخش برش داده شده مجدداً توسط آلومینیم پر میشوند. به دلیل اینکه آلومینیم مادهای غیر مغناطیسی است، هیچگونه اثری نیز بر مسیرهای شار ندارد.
یکی از معایب این نوع از موتورها ریپل گشتاور بوده که دلیل آن برجستگی قطبهای روتور میباشد.[13] سرعت چرخش در این موتورها عمدتاً با فرکانس ولتاژ ورودی به موتور تغییر داده میشود و کاربرد آنها نیز به دلیل رنج کاری مشخص (چند وات تا 22kW) بیشتر در مصارف ابزار دقیق میباشد.
موتور هیسترزیس
در مورد تلفات هیسترزیس میدانیم که تغییر جهت شار باعث اصطکاک داخلی مولکولها و حوزههای مغناطیسی شده که در نتیجه آن مقداری انرژی به گرما تبدیل میشود.
در شکل زیر میلهای از جنس یک آلیاژ ویژه در داخل یک پیچک قرار داده شده و پیچک توسط یک جریان مستقیم و قابلکنترل تحریک میشود. همچنان که در دیاگرام مولدی نشان داده شده مقدار و جهت این جریان میتواند تغییر کند. اکنون در نظر بگیرید که جریانی در پیچک جاری است و شار ایجاد شده در هسته در نقطه a قرار دارد.
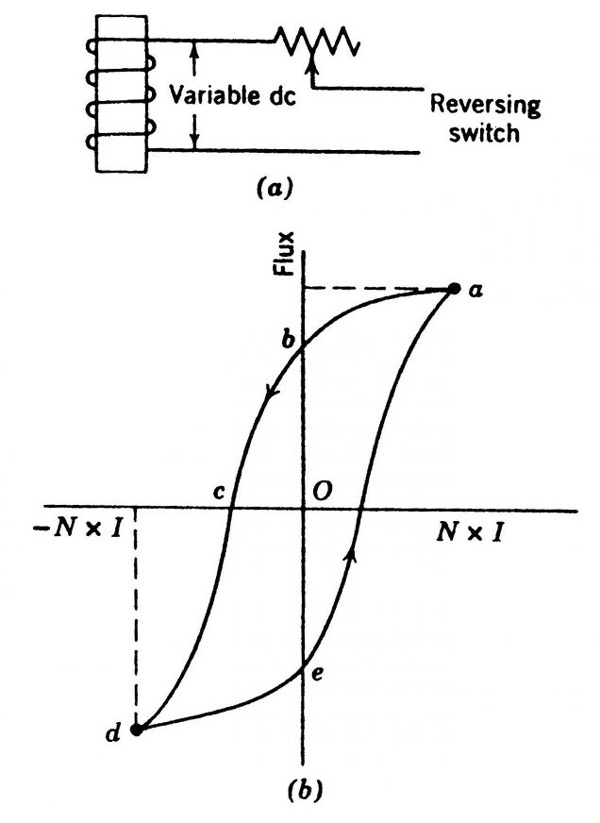
اگر جریان را کاهش دهیم تا به صفر برسد، در این حالت هسته آهنی هنوز هم خاصیت مغناطیسی داشته و شار آن در نقطه b قرار دارد. جریان را معکوس کرده و در جهت عکس آن را زیاد میکنیم. برای به صفر رسانیدن شار هسته همچنان که در شکل نشان داده شده است (نقطه c)، به جریانی در جهت عکس نیاز است.
با افزایش بیشتر این جریان معکوس، هسته در جهت عکس مغناطیس شده و شار هسته به نقطه d میرسد. با کاهش مجدد جریان و رساندن آن به مقدار صفر شار هسته در نقطه e و در جهت عکس قرار میگیرد. در مرحله نهایی مجدداً جریان را معکوس کرده و در جهت اولیه، آن را افزایش میدهیم. در این حالت مسیر طی شده توسط شار هسته در امتداد خط ea بوده و نقطه نهایی همان نقطه آغازین خواهد بود.
هرگاه هسته در یک جهت مغناطیس شود، تمایل به حفظ خاصیت مغناطیسی دارد
اگر جریان (و آمپر دورها یعنی NI) صفر شود، شار ob در هسته باقی میماند. برای به صفر رساندن این شار، به یک نیروی مغناطیسی منفی (برابر با oc) نیاز داریم.
این حلقه را حلقه هیسترزیس (Hysteresis) مینامند. هستههای مختلف، منحنیهای هیسترزیس متفاوتی دارند. اگر در موتورهای القایی معمولی سهفاز یا تکفاز، رتور را برداریم، و بهجای آن، یک رتور استوانهای از یک آلیاژ فولادی مناسب و بدون میلههای القایی قرار دهیم و سپس سیمپیچیهای استاتور را به یک منبع ولتاژ مناسب وصل کنیم، رتور شروع به چرخش نموده و سرعت آن افزایش خواهد یافت تا بهسرعت سنکرون برسد.[14]
در این حالت استوانه فولادی مذکور مانند رتور قفس سنجابی عمل کرده و جریانهای گردابی با مسیرهای کاملاً پیچیده در آن جاری میشوند؛ بنابراین گشتاورهای راهاندازی و شتاب گیری موتور هر دو ناشی از جریانهای گردابی هستند.
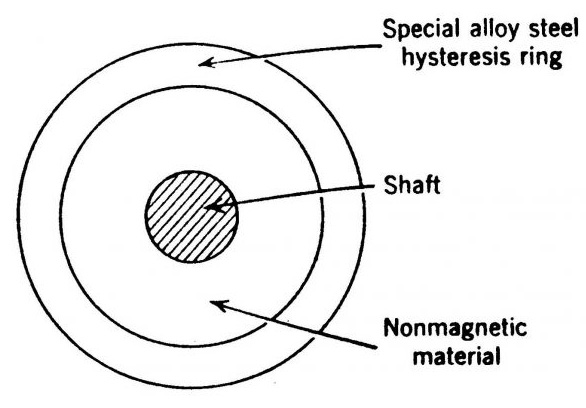
در سرعت سنکرون، قابلیت روتور در حفظ خاصیت مغناطیسی، گشتاور ایجاد میکند. حداکثر گشتاور، در این حالت بهوسیله سطح حلقه هیسترزیس تعیین میشود. این موتورها در اشکال مکانیکی متعددی ساخته میشوند. یک روتور نمونه در شکل زیر نشان داده شده است.
کاربرد موتورهای هیسترزیس
موتورهای هیسترزیس خیلی کوچک با توان ۱/۱۰۰۰ hp ام، بهراحتی و با هزینه نسبتاً کمی تولید میشوند. موتورهای ساعت و یا دیگر دستگاههای زمانی از این نوع هستند.
با افزایش ابعاد موتور، هزینه ساخت آن سریعاً و با شیب نسبتاً زیادی افزایش مییابد. در این موتورها عمدتاً از آلیاژ فولاد در روتور استفاده میشود که گران میباشد.
اگر روتور یک موتور سنکرون نوع رلوکتانسی را با یک رتور هیسترزیس مناسب جایگزین کنیم، توان موتور افزایشیافته و در مقابل Tmax کاهش مییابد. در نتیجه موتور اولیه به یک موتور ضعیفتر با بازدهی کمتر تبدیل میشود. بنابراین برای مقادیر نامی مشابه، موتور هیسترزیس نسبت به موتورهای رلوکتانسی حجم بزرگتری دارد.
در این موتورها روتور کاملاً متقارن است. بنابراین یک روتور در یک میدان دو، چهار، شش و یا هشت قطب مورد استفاده قرار میگیرد. در برخی درایوهای نواری و دستگاههای زمانی که به موتورهای با چند سرعت متفاوت مانند؛ ۱۸۰۰ و ۲۰۰۰ دور در دقیقه نیازمنداند، با تعبیه دو مجموعه سیمپیچی بر روی استاتور (چهار و شش قطب) و تغییر وضعیت دادن از یکی به دیگر، میتوانیم این نیاز را پاسخ دهیم.
البته این کار در موتورهای رلوکتانسی امکان پذیر نیست. با وجود این میتوان آنها را طوری ساخت، که در سرعت هایی با نسبت 1 به 2 مثلا ۳۶۰۰ و ۱۸۰۰ دور بر دقیقه کار کنند، توان خروجی نیز با تغییر سرعت قاعدتا تغییر خواهد کرد.
موتور آهنربای دائم (PMS)
موتورهای سنکرون آهنربای دائم (permanent-magnet synchronous motor) با استفاده از آهنرباهای کار شده در روتورشان میتوانند میدانهای مغناطیسی دائم بسازند. در حالت موتوری طبق معمول استاتور این موتورها به برق AC متصل بوده و میدان مغناطیسی چرخانی تولید میکند. فرآیند چرخش شفت به این صورت است که در سرعت سنکرون میدان مغناطیسی ثابت روتور با میدان دوار استاتور قفل شده و با همان سرعت سنکرون شروع به چرخش مینماید.
عملکرد موتورهای سنکرون آهنربای دائم با موتورهای بدون جاروبک (BLDC) تقریبا یکی میباشد.
به دلیل برخی از ویژگیهای خاص این نوع موتورها از سال 2000 بهعنوان موتورهای محرک آسانسورهای بدون گیربکس مورد استفاده قرار میگیرند.[15]
البته گفتن این نکته نیز ضروریست که اکثر موتورهای قرار گرفته در این دسته نیازمند “راهانداز فرکانس متغیر” میباشند، این به این معناست که این موتورها خود راهانداز نیستند.[16]
موتور با تحریک DC

همانگونه که از نام آنها مشخص است این موتورها برای عملکرد به یک تغذیه DC نیازمنداند. این جریان DC را میتوان از طریق حلقههای لغزان (Slip rings) و یا در قالب بدون کموتاتور (BLDC) به روتور موتور سنکرون تزریق گردد.[17]
موتورهای سنکرون تحریک DC عمدتاً برای توانهای بیشتر از 1 کیلووات ساخته میشوند
تحریک این موتورها میتواند توسط یک ژنراتور DC مجزا و یا منبع تغذیه مجزای DC صورت پذیرد.
روشهای راهاندازی ماشین سنکرون
متاسفانه بالای یک سایز بخصوص دیگر ماشینهای سنکرون خودراهانداز نیستند. این مسئله به دلیل اینرسی بالای روتور در حالت ایستا میباشد؛ به دلیل وجود این اینرسی روتور نمیتواند در آن واحد، سرعت سنکرون ایجاد شده توسط میدان مغناطیسی را دنبال نماید. این مسئله درحالیست که گشتاور متوسط موتور سنکرون در حالت ایستا (standstill) صفر میباشد.[18]
برای راهاندازی ایمن موتور سنکرون سه روش اساسی زیر میتواند به کار رود:
- کاهش سرعت میدان مغناطیسی (توسط کاهش فرکانس الکتریکی).
- استفاده از یک گراننده اولیه.
- استفاده از سیمپیچهای میرایی (قفس لبلان).
راهاندازی موتور با کاهش فرکانس الکتریکی
چنانچه سرعت چرخش میدان مغناطیسی استاتور بهاندازه کافی کم باشد رتور مشکلی از نظر شتاب گرفتن و قفل شدن با میدان مغناطیسی استاتور نخواهد داشت. سرعت میدان مغناطیسی استاتور را میتوان با افزایش تدرجی fs تا مقدار نامی بهسرعت کار عادی رساند.[19]
وقتی موتور سنکرون در سرعتی کمتر از سرعت نامی کار میکند ولتاژ داخلی آن (Eph=k. Φm. ωs) کمتر از مقدار معمول شده لذا جریان استاتور بالا میرود پس باید در هنگام راهاندازی به روش فوق دقت شود که همزمان با کاهش فرکانس، ولتاژ نیز کاهش یابد تا به موتور آسیبی نرسد.
راهاندازی موتور بهوسیله گرداننده اولیه خارجی
در این روش توسط یک موتور راهانداز خارجی سرعت رتور را بهسرعت سنکرون رسانده و سپس ماشین سنکرون را مانند یک مولد با سیستم قدرت موازی مینماییم، در ادامه موتور راهانداز را از محور ماشین جدا میکنیم، وقتی موتور راهانداز جدا شود سرعت محور ماشین کم شده و میدان مغناطیسی رتور (Br) از میدان برآیند فاصله هوایی (Bnet) عقبافتاده و ماشین سنکرون مانند موتور عمل میکند. وقتی عمل راهاندازی تمام شد میتوان مانند تمامی موتورها بار دلخواه را به شفت موتور وصل نموده.
موتور راهانداز خارجی تنها باید بر لختی موتور بیبار غلبه کند لذا قدرت آن بسیار کمتر از موتور اصلی میباشد.
بیشتر موتورهای سنکرون بزرگ دارای سیستم تحریک بدون جاروبک میباشند که روی محور آنها سوار است و معمولاً میتوان از این ماشینهای تحریک بهعنوان موتور راهانداز استفاده نمود.
راهاندازی موتور با استفاده از سیمپیچهای میرایی

سیمپیچهای میرایی میلههای خاصی هستند که در شیارهایی در رخ قطبهای موتور سنکرون کار گذاشته میشوند و آنها را توسط حلقههایی از هر دو طرف اتصال کوتاه میکنند.
چنانچه در ابتدای راهاندازی منبع تحریک قطع باشد میدان دوار استاتور در سیمپیچهای میرایی یک ولتاژ القا میکنند و رتور موتور سنکرون ما مانند رتور یک موتور آسنکرون دور گرفته و راهاندازی میشوند.
به طور خلاصه چنانچه موتور سنکرونی سیمپیچ میرایی داشته باشد میتوان آن را با طیکردن مراحل زیر راهاندازی نمود:
- سیمپیچ میدان تحریک را از منبع تغذیه قطع نموده و آن را اتصال کوتاه میکنیم.
- ولتاژ سهفاز به استاتور اعمال کرده و اجازه میدهیم رتور مانند یک موتور القایی با سرعتی نزدیک بهسرعت سنکرون شتاب بگیرد (در این مرحله موتور باید بیبار باشد تا سرعتش بتواند نزدیک به Ns یا ωs گردد).
- مدار میدان DC را به منبع تغذیه وصل مینماییم لذا موتور با سرعت سنکرون به کار خود ادامه میدهد پس حالا میتوان بار دلخواه را نیز روی رتور قرار داد.
علت اتصال کوتاه نمودن تحریک جلوگیری از ایجاد ولتاژ القایی بالا در دو سر جاروبکها میباشد.
راهاندازی ژنراتور سنکرون
تمام موارد بالا در رابطه با استارت موتور سنکرون بود اما شاید بپرسید که یک ژنراتور سنکرون توان بالا در نیروگاه به چه نحوی استارت میشود؟
در نیروگاه در ابتدا با استفاده از سیستم تحریک پیشرفته ژنراتور، آن را بهصورت موتور با فرکانس بسیار پایین بهوسیله GCB استارت میکنند و وقتی روتور بهاندازه کافی دور گرفت سیستم تحریک و جریان استاتور قطع شده و به توربین اجازه داده میشود ادامه حرکت روتور را برعهده بگیرد، پس از آن مجدداً سیستم تحریک وصل شده و این بار ماشین سنکرون غولپیکر ما به شکل ژنراتور به کار خود ادامه میدهد.
توضیحات بالا برای اکثر ژنراتورهای نیروگاههای گازی و بخاری صادق است بااینحال اجازه دهید قسمتی از گزارش کار بازدید از نیروگاه دماوند که در این زمینه میباشد را با هم بخوانیم:
«توربین و سوخت گازی ما نمیتواند شفت 170 تنی ما را به حرکت در بیاورد به همین علت ما باید ژنراتور را به یک موتور تبدیل نماییم.
به همین دلیل از طریق GCB که برق خود را از باس مشترک 6.6 کیلوولت تامین میکند برای استارت واحد استفاده میکنیم.
در همین راستا تحریک موتور سنکرون را وصل کرده و از طریق GCB به کمک یک سیستم SFC (تأمینکننده ولتاژ AC با فرکانس دلخواه) به استاتور توان تزریق میکنیم، دلیل استفاده از اینورتر (SFC) این است که ولتاژ با سطح پایین و فرکانس کم به استاتور دهیم تا جریان راهاندازی کاهش یابد (باعث ایجاد یک میدان دوار در استاتور شده که با سرعتی کمتر میچرخد به همین دلیل روتور میتواند با آن خود را هماهنگ کرده و شروع به چرخش نماید) و بهمرورزمان فرکانس را افزایش میدهیم.
جهت راهاندازی ژنراتور نیروگاه (159 مگاواتی) به جریانی در حدود 7000 آمپر نیازمندیم و بیانگر این است که استارت یک واحد ژنراتوری بهصورت کلی به 4 مگاوات توان نیازمند است.
پس از دور گرفتن و رسیدن به فرکانس 40 هرتز؛ برق استاتور و تحریک را قطع میکنیم (در این حالت رتور مانند یک جسم سرب در حال چرخیدن هست) در این زمان توربین را آتش کرده و فرکانس را به 50 هرتز میرسانیم بهمحض رسیدن به فرکانس 50 هرتز تحریک را مجدداً وصل نموده و ماشین تبدیل به ژنراتور میشود. در این هنگام توان راکتیو بزرگی بروی خروجی ظاهر شده که در صورت وصل شدن به شبکه برق باعث ایجاد ناپایداری میگردد به همین جهت بهصورت پلکانی به ژنراتور بار میدهند تا توان اکتیو نیز پدیدار شود.
حال ژنراتور آماده بهرهبرداری است و در ادامه مراحل موازی کردن (parallel) نیز بهصورت خودکار صورت میگیرد.»
معادلات ماشین سنکرون
در این بخش نگاهی مختصر به معادلات بنیادی در ماشین سنکرون خواهیم داشت، البته تمرکز ما بیشتر در این قسمت بروی مدار معادل این ماشین میباشد، در ابتدای کار دو معادله بسیار مهم یعنی سرعت و ولتاژ القایی در این ژنراتور سنکرون (تحلیل موتوری نیز با کمی تفاوت به این شکل است) آورده شده است.
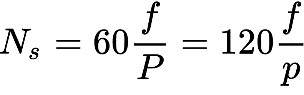

معادله اول که با Ns نشان داده شده بیانگر سرعت سنکرون (دور در دقیقه) ماشین میباشد، در این معادله به دو پارامتر f فرکانس و P که میتواند تعداد قطب (با ضریب 120) و یا جفت قطب (با ضریب 60) باشد، نیازمندیم. در معادله دوم ولتاژ تحریک را می بینیم که همان ولتاژ القائی یا ولتاژ داخلی یا ولتاژ تولید شده است. در این معادله نیز به Ne تعداد دور سیمپیچی، φ شار میدان مغناطیسی و f که فرکانس نامی میباشد، نیاز داریم.
φ شار هر قطب به خاطر جریان تحریک (If) تعبیر میشود. N تعداد حلقهها یا دورها در هر فاز بوده و Kw ضریب سیمپیچی نام دارد. از روابط (1-1) و (1-2) داریم:
Ef ∞ nφ
میبینیم ولتاژ تحریک (EA) که همان ولتاژ القایی یا ولتاژ داخلی یا ولتاژ تولید شده میباشد، با شار تحریک (Excitation Flux) و سرعت متناسب است. واضح است که شار تحریک (φ) نیز با جریان تحریک (If) تناسب دارد.
تغییرات ولتاژ تحریک (EA) برحسب جریان تحریک (If) تحت سرعت ثابت در شکل (1-1) نشان داده شده است.
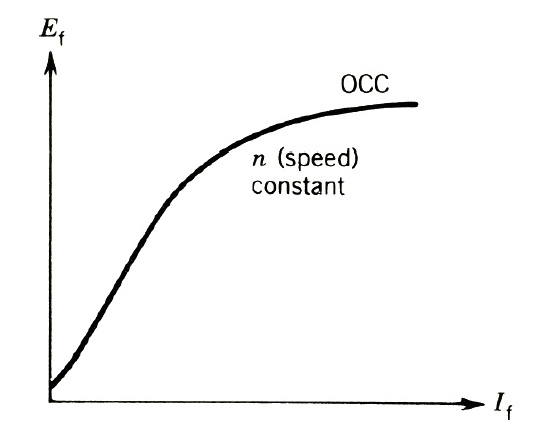
ولتاژ القایی مربوط به If=0 به خاطر پدیده پس ماند میباشد. در ابتدا تغییرات EA = (Ef) برحسب If خطی است. اما پس از عبور از مرحله تغییرات خطی، اگر If زیاد شود، φ دیگر با If رابطی خطی ندارد (مسئله اشباع) و لذا طبق منحنی شکل (1-1)، Ef نیز تقریباً ثابت میشود. به منحنی شکل (1-1) مشخصه مدارباز ژنراتور (Open Circuit Characteristic) سنکرون سهفاز نیز اطلاق میشود.
باید دانست در حالت بیباری یعنی در حالتی که بار به پایانههای استاتور وصل نباشد، در این صورت Ef معادل ولتاژ پایانه ژنراتور است که میتوان آن را با ولتمتر اندازهگیری نمود. به همین دلیل به مشخصه شکل (1-1) مشخصه مدارباز یا OCC اطلاق میشود. نام دیگر این منحنی مشخصه مغناطیس شوندگی است. اگر پایانههای استاتور ژنراتور سنکرون به بار سهفاز متصل شود جریانهای Ia، Ib و Ic برقرار میگردد، فرکانس این جریانها با Ef یکسان است. این سه جریان نیز میدانهای گردان در شکاف هوایی پدید میآورند؛ لذا منتجه شار در شکاف هوایی از مجموع دو شار گردان رتور و استاتور حاصل میگردد. باید دانست سرعت چرخش این دو شار یکسان بوده و همان سرعت سنکرون است (رابطه 1-1). گیرم φ شار حاصله توسط جریان تحریک If و φ به خاطر جریان استاتور Ia حاصل شود. به φ شار عکسالعمل آرمیچر (Armature Reaction Flux) نیز گفته میشود. پس:
شار منتجه در شکاف هوایی (از اشباع صرفنظر شده است) = φr = φf + φa
باید دانست سرعت دوران هر سه شار فوقالذکر در شکاف هوایی همان سرعت سنکرون است (رابطه 1-1).
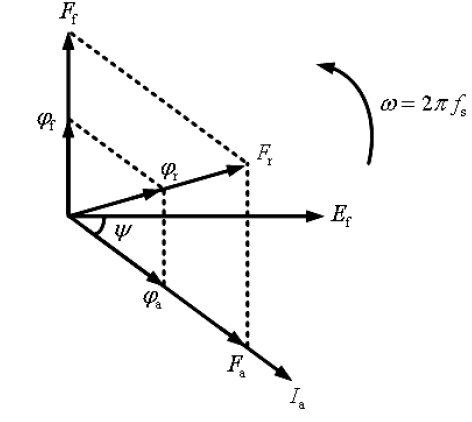
شکل (1-2) نمودار فازوری فضایی (Space Phasor Diagram) این سه شار را نشان میدهد. mmf مربوط به رتور (Ff) که در اثر جریان تحریک If حاصل میشود، شار φf را تولید میکند و همگی در یک امتداد نشان داده شدهاند. ولتاژ تحریک (Ef) به خاطر اصل فارادی از φf به میزان 90 درجه عقب میافتد. گیریم جریان استاتور (Ia) از Ef به میزان ϴ درجه عقب باشد. mmf مربوط به Ia که با Fa نشان داده میشود شار φa را تولید میکند و همگی در امتداد Ia در شکل (1-2) نشان داده شدهاند. mmf منتجه یا Fr بهقرار زیر است:
Fr = Ff + Fa
اگر از اشباع صرفنظر شود در این صورت φr نیز منتجه φf و φa خواهد بود و باید دانست φr را همان Fr تولید مینماید.
ولتاژ EA، ولتاژ تولید شده در یک فاز مولد سنکرون است اما ولتاژی نیست که معمولاً در پایانههای مولد ظاهر میشود. در حقیقت تنها زمانی ولتاژ داخلی (EA)، برابر با ولتاژ خروجی یک فاز (Vφ) است که جریانی از آرمیچر ماشین نگذرد. تفاوت بین (EA) و (Vφ) در اثر چند عامل رخ میدهد:
- اعوجاج شاری که به علت جریان استاتور در میدان مغناطیسی فاصلهٔ هوایی ایجاد شده و عکسالعمل آرمیچر نامیده میشود.
- خودالقایی سیمپیچهای آرمیچر.
- مقاومت سیمپیچهای آرمیچر.
- اثر شکل قطب برجستهٔ روتور (این مورد مربوط به روتور قطب برجسته میشود).
عکسالعمل آرمیچر موجب تغییر شار در مدار مغناطیسی مولد میشود در نتیجه میتوان برای آن ولتاژی در نظر گرفت (ولتاژ عکسالعمل آرمیچر) و برای مدل کردن آن از یک القاگر سری با ولتاژ داخلی استفاده کرد: (Xαr)
سیمپیچهای استاتور نیز یک راکتانس خودالقایی و یک مقاومت دارند: (XA)، (RA)
معمولاً راکتانسهای ناشی از عکسالعمل آرمیچر و خودالقایی ماشین را با هم ترکیب میکنند و بهصورت راکتانس سنکرون (Xs) نمایش میدهند که در این صورت ولتاژ پایانه را میتوان بهصورت زیر بیان کرد (در ماشینهای سنکرون واقعی راکتانس سنکرون معمولاً بسیار بزرگتر از مقاومت سیمپیچ است):
مدار معادل ماشین سنکرون
جهت درک بهتر، در این بخش میخواهیم به مدار معادل و مشخصههای ماشین سنکرون به شکلی تقریباً مفصل بپردازیم.
دقت داشته باشید که ما در این بخش توجه خود را به ماشینهای سنکرون با رتور استوانهای معطوف میداریم. برای مشخصتر شدن موضوع، تمرکز ما در این بخش بروی نوع ژنراتور و البته حالت ماندگار (مانا – Steady State) میباشد؛ لذا میتوان از ثابت زمانیهای سیمپیچی تحریک و سیمپیچی میراکننده صرفنظر کرد. گفتنی است ازآنجاییکه ماشینهای سنکرون سهفاز عمدتاً در حالت متعادل مورد بهرهبرداری قرار میگیرند، لذا مدل ارائه شده بر مبنای یکفاز (معمولاً فاز a) استوار است (Per Phase Model). جریان If (تحریک) در شکاف هوایی ماشین، شار φf را حاصل میسازد. جریان Ia در استاتور شار φa را پدید میآورد. Φa از دو بخش تشکیل شده:
- φal یا شار نشتی (Leakage Flux) که فقط سیمپیچی استاتور را دور میزند و در بر میگیرد و سیمپیچی تحریک روتور را در برنمیگیرد.
- φar که به شار عکسالعمل آرمیچر (Armature Reaction) موسوم بوده و در شکاف هوایی شکل میگیرد و سیمپیچ تحریک رتور را نیز در برمیگیرد.
- Φar بخش اعظم Φa و Φal بخش کوچکی از Φa را تشکیل میدهد.
لذا شار منتجه در شکاف هوایی (Φr) از دو مؤلفه زیر تشکیل شده است.
- Φf به خاطر میدان روتور
- Φar به خاطر عکسالعمل آرمیچر
گفتنی است:
- Φf در استاتور ولتاژ Ef را القا میکند.
- Φar نیز در استاتور ولتاژ القاء میکند (Ear).
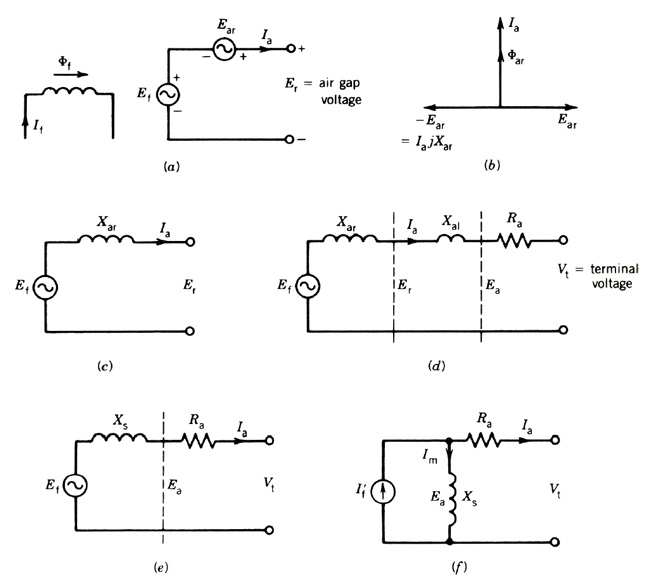
منتجه دو ولتاژ القایی Ef و Ear به نام ولتاژ منتجه معروف است (Er) و پرواضح است که Er توسط شار منتجه Φr حاصل شده است. همانطور که قبلاً گفتیم Ef همان ولتاژ تحریک است و از آزمایش مدارباز (شکل 1-1) به دست میآید. Ear ولتاژ عکسالعمل آرمیچر است و به Φar و در ادامه به Ia بستگی دارد. باید دانست به Er علاوه بر لفظ ولتاژ منتجه (Resurltant Voltage)، ولتاژ شکاف هوایی (Air Gap Voltage) نیز گفته میشود. با توجه به شکل (1، 1-3) داریم:
(Er = Ear + Ef (3-1
(Ef = Ear + Er (4-1
از نمودار فازوری شکل (2، 1-3) داریم:
- Ear از φar یا Ia به میزان 90 درجه عقب است.
- Ia به میزان 90 درجه از -Ear عقب است.
لذا در رابطه (1-4) ولتاژ (Ear-) را میتوان با افت ولتاژ در دو سر Xar به ازاء عبور از جریان Ia مدل نمود.
بنابراین رابطه (1-4) بهصورت زیر در میآید.
(Ef = Ia jXar + Er (5-1
Xar به نام راکتانس عکسالعمل آرمیچر یا راکتانس مغناطیس کنندگی (Magneritizing Reactance) مفروض است و در شکل (3، 1-3) نشان داده شده است. اگر مقاومت استاتور و راکتانس نشتی Xal برای مدلسازی شار نشتی به مدار معادل افزوده شود، در این صورت مدار معادل شکل (4، 1-3) حاصل میشود. گفتنی است که این مدار معادل برای فاز a معتبر است. برای فازهای b، c نیز به مدارهای مشابهی همچون شکل (4، 1-3) میرسیم، اما کمیتهای ولتاژ و جریان به میزان 120 و 240 درجه نسبت به شکل (4، 1-3) اختلاف فاز دارند (سیستم سهفاز متعادل)، باید دانست Ra در این مدل مقاومت مؤثر (Effective Resisatave) بوده و 1.6 برابر مقامت DC سیمپیچ استاتور میباشد. در مقاومت مؤثر، اثر پوستی (Skin Effect) و درجه حرارت خود را نمایان میسازند. مجموع Xar، Xal را با Xs نشان میدهیم و Xs به نام راکتانس سنکرون (Synchronous Reactance) ماشین معروف است؛ لذا مدار معادل نهایی مطابق شکل (5، 1-3) خواهد بود. باید دانست:
Xs = Xar + Xal (راکتانس سنکرون)
Xs = Xar + Xal (امپدانس سنکرون)
مدار معادل شکل (5، 1-3) به نام مدار معادل تونن ژنراتور سنکرون معروف است. شکل (6، 1-3) مدار معادل نورتن ژنراتور سنکرون را نشان میدهد. در مدار نورتن دارم:
I´ = Ef / Xs
| I´f | = (Xar / Xs) nIf
برای اثبات این رابطه میتوانید به کتاب ماشینهای الکتریکی تألیف سلمون ترجمه مهندس سالمی رجوع نمایید.
درنهایت باز متذکر میشویم که تمام موارد گفته شده مربوط به ژنراتور سنکرون سهفاز با رتور استوانهای است.
توان P و Q در ماشین سنکرون
با توجه به اینکه تا اینجای کار پیشفرض محاسباتی را بروی ژنراتور سنکرون گذاشته بودیم این قسمت نیز با این فرض که در حال تحلیل یک ژنراتور سنکرون میباشیم را ادامه میدهیم.
اگر ژنراتور سنکرون را به شکل زیر در نظر بگیریم:
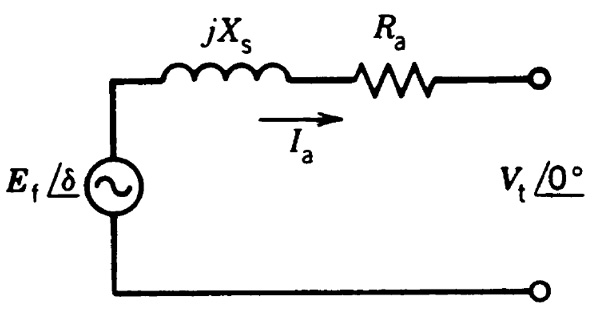
میتوان برای توان دریافتی شبکه نوشت:
با ساده کردن روابط، توان اکتیو و راکتیو بهصورت زیر محاسبه میشوند:
اگر از مقاومت استاتور صرفنظر کنیم داریم:
همانطور که مشخص است توان اکتیو (ایجادکننده گشتاور) با زاویه δ رابطه دارد و نباید این زاویه از 90 درجه بیشتر شود (زیرا ناپایدار میشود).
اجازه دهید برای درک بهتر نگاهی به منحنیهای مشهور توانایی (Capability Curve) در ماشین سنکرون داشته باشیم:
«مکان هندسی توان مختلط هر فاز» که در شکل (1-4) نمایشدادهشده است یکی از این منحنیها میباشد. بهعنوانمثال ماشین سنکرون نمیتواند در تمامی نقاط داخل منطقه محصور شده توسط دایره (شکل 1-4) مورد بهرهبرداری قرار گیرد. علت این است که با محدودیتهای در هنگام بهرهبرداری روبرو هستیم. این محدودیتها بهقرار زیرند:
- گرم شدن آرمیچر (استاتور) به خاطر جریان آرمیچر.
- گرم شدن مدار تحریک به خاطر جریان تحریک (If).
- حد پایداری ماندگار (مانا) یا Pmax در 90 = δ.
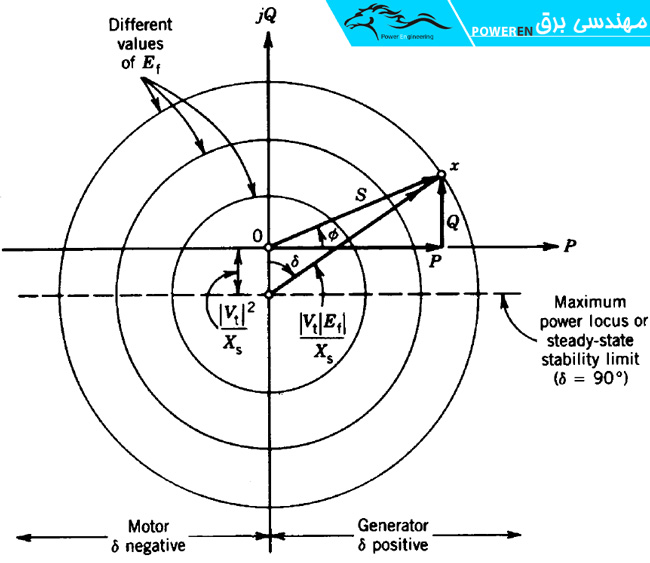
حال میتوان این محدودیتها را اعمال نمود و ناحیه عملیاتی مطلوب را به دست آورد.
در شکل (1-5) دایرهای به شعاع S = Vt Ia رسم شده و مرکز این دایره مبدأ مختصات است (نقطه O). این دایره ناحیهای را تعریف میکند که در آن گرم شدن آرمیچر از حد مجاز فراتر نمیرود. حال در همین شکل دایرهای به مرکز Y رسم میکنیم. مشخصات این دایره جدید بهاینترتیب است:
- شعاع دایره (|Vt| * |Ef|) / |Xs| است.
- مختصات مرکز دایره -(|Vt|)2 / |Xs| و 0 میباشد.
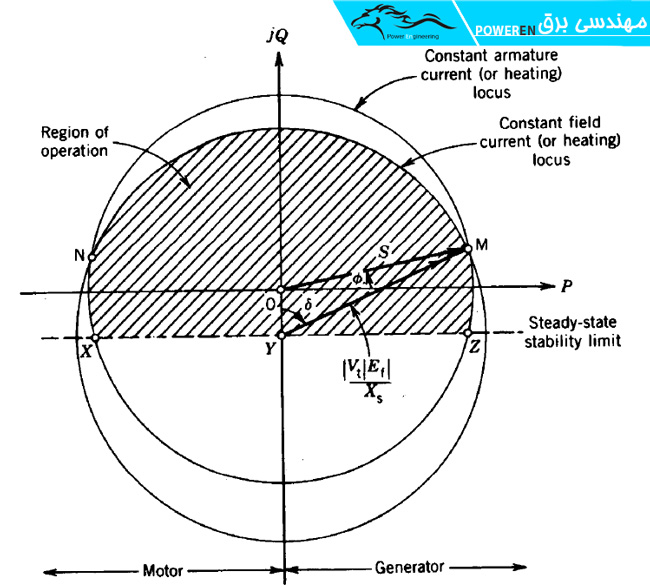
این دایره ناحیهای را مشخص میکند که در آن گرم شدن مدار تحریک از حد مجازی فراتر نمیرود خط افقی XYZ حد پایداری ماندگار (مانا) را مشخص میسازد. به این سه منحنی یعنی دایره به مرکز نقطه O و دایره به مرکز Y و خط XYZ در شکل (1-5) منحنیهای توانایی ماشین سنکرون اطلاق میگردد. ناحیه هاشور زده که توسط این سه منحنی در شکل (1-5) محصور است، ناحیه عملیاتی ماشین سنکرون را مشخص میسازد. در شکل (1-5) ناحیه عملیاتی موتور و ژنراتور مشخص شده است. نقطه تلاقی دو دایره در شکل (1-5) نقطه بهرهبرداری بهینه را مشخص میسازد. باید دانست نقطه M مربوط به حالت ژنراتوری و نقطه N مربوط به حالت موتوری میباشد. علت بهینه بودن این نقاط آن است که حداکثر بهرهوری از مدار تحریک و استاتور در این نقاط حاصل میشود.[20]
زاویه گشتاور موتور سنکرون
اگر بار مکانیکی کوچکی به شفت موتور متصل شود، سرعت موتور برای یک لحظه کاهشیافته بهطوریکه دیگر شار میدان dc با شار چرخان استاتور هم فاز نخواهد بود. با تثبیت موقعیت جدید روتور، سرعت آن همچنان سرعت سنکرون است، ولی این موقعیت جدید بهاندازه چند درجه از روتور در حالت بیباری عقبتر خواهد بود.
اگر طبق شکل زیر خطوط شار ایجاد شده در فاصله هوایی را شبیه رشتههای لاستیک (یا مثلاً فرچه) در نظر بگیریم که روتور و میدان چرخان را به یکدیگر قفل کرده است، افزایش بار مکانیکی شفت موتور باعث بیشتر شدن زاویه عقبافتادگی روتور از میدان استاتور یعنی α و در نتیجه کشیده شدن بیشتر رشتههای لاستیکی میشود. سرانجام زمانی که زاویه α به ۹۰ درجه میرسد رشتههای لاستیکی پاره شده و موتور از حالت سنکرون خارج خواهد شد.
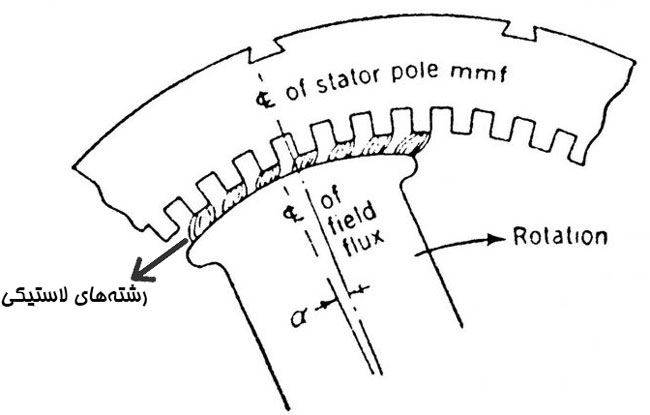
در این حالت موتور به حداکثر گشتاور خود (یعنی گشتاور pull-out) رسیده است.
و بهصورت کلی بهغیراز لحظاتی که به موتور تغییرات بار اعمال میشود در سایر شرایط در سرعت سنکرون خود خواهد چرخید.
توجیه این پدیده چنین است: روتور در هنگام اعمال تغییر بار نوسان کرده و سرانجام در موقعیت نهایی خود تثبیت میشود. این نوسانات در برخی کاربردها بهویژه در مواردی که از موتور برای چرخاندن نوارها و تسمه نقالهها استفاده میشود بسیار نامطلوب است. البته به شکل لحظهای میتوان با استفاده از میرا کنندههای قفس سنجابی بروی روتور و یا ترجیحاً نصب چرخ لنگر بر روی شفت موتور، این نوسانات را حداقل نمود.
کنترل ضریب توان موتور سنکرون
یکی از مزایای عمده موتورهای سنکرون سهفاز آن است که توان موتور را میتوان با تغییر جریان تحریک (If) کنترل نمود. به سخنی دیگر تغییر جریان تحریک باعث میگردد که جریان موتور از حالت پس فاز به حالت پیش فاز برود (و بالعکس). این امر را میتوان توسط نمودار فازوری توجیه نمود. گیریم موتور سنکرونی به شبکه بینهایت وصل باشد و توان اکتیو آن ثابت باشد (بار موتور ثابت است). شکل (1، 1-6) مدار معادل موتور را نشان میدهد و فرض بر آن است که مقاومت استاتور ناچیز است. در شکل (2، 1-6) نمودار فازوری موتور رسم شده است.
برای موتور سهفاز توان اکتیو بهقرار زیر است:
P = 3Vt Ia CosΦ
ازآنجاییکه Vt ثابت است لذا برای آن که موتور تحت شرایط توان اکتیو ثابت مورد بهرهبرداری قرار گیرد، باید
عدد ثابت = Ia CosΦ
بهعبارتدیگر مؤلفهای از Ia که هم فاز Vt است باید همواره ثابت باقی بماند؛ لذا مکان هندسی Ia خطی عمودی است که از نقطه مربوط به ضریب توان واحد میگذرد (از نوک فازور Ia2 در شکل (2، 1-6). شکل (2، 1-6) برای سه جریان مختلف استاتور رسم شده است).
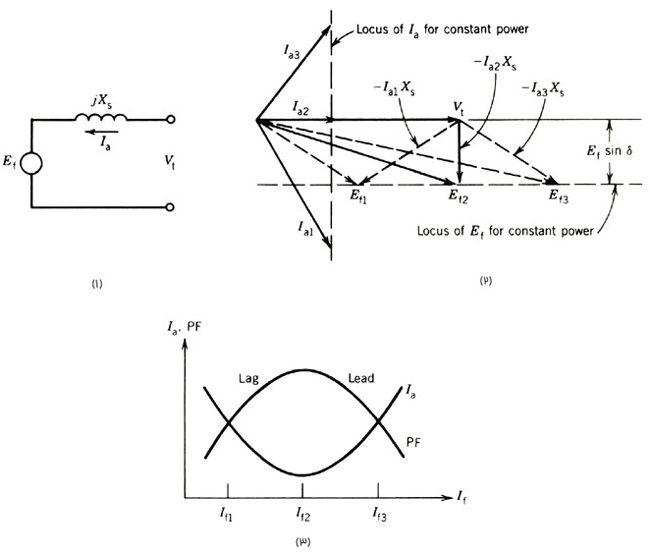
این سه جریان بهقرار زیرند:
پس فاز نسبت به Ia = Ia1 Vt
هم فاز = Ia2 Vt
پیش فاز نسبت به = Ia3 Vt
برای این سه جریان سه ولتاژ Ef1، Ef2 و Ef3 حاصل میشود. این سه ولتاژ نیز متناظر با سه جریان تحریک If1، If2 و If3 است. در شکل (2، 1-6) سه ولتاژ Ef1، Ef2 و Ef3 نیز رسم شده است.
با توجه به موارد گفته شده اگر جریان تحریک If1 باشد در این صورت ولتاژ درون ماشین Ef1 بوده و جریان استاتور Ia1 است (شکل 2، 1-6). در این صورت ماشین در شرایط پس فاز کار میکند زیرا Ia1 از Vt عقبافتاده است. این حالت را حالت زیر تحریک (Under Excition) موتور سنکرون مینامند. اگر جریان تحریک If2 طوری باشد که Ef2 را در ماشین تولید کند (شکل 2، 1-6)، در این صورت جریان استاتور Ia2 بوده و مشاهده میشود ضریب توان واحد برای موتور حاصل میشود، زیرا Vt با Ia2 هم فاز میشود. به این شرایط حالت تحریک عادی یا تحریک نرمال (Normal Excition) اطلاق میشود.
اگر جریان تحریک If3 طوری باشد که Ef3 را در ماشین تولید کند (شکل 2، 1-6). در این صورت جریان استاتور Ia3 بوده و مشاهده میشود که موتور تحت ضریب توان پیش فاز کار میکند. زیرا Ia3 از Vt جلو میافتد. به این شرایط حالت فوق تحریک (Over Excition) اطلاق میشود. از موارد گفته شده نتیجه میشود با تغییر جریان تحریک موتور سنکرون تحت توان اکتیو ثابت میتوان ضریب توانهای مختلف از خود بروز دهد. باید گفت:
- در حالت زیر تحریک موتور از شبکه P، Q میکشد (حالت پس فاز – سلفی)
- در حالت فوق تحریک موتور از شبکه P میکشد ولی Q به شبکه تزریق میکند (حالت پیش فاز – خازنی)
- در حالت تحریک عادی یا تحریک نرمال موتور فقط P از شبکه میکشد (ضریب توان واحد – مقاومتی).
اگر بخواهیم موتور سنکرون صرفاً در نقش جبرانکننده توان راکتیو ظاهر شود باید آن را بهصورت بدون بار و در حالت فوق تحریک راهاندازی نمود، در این حالت به موتور سنکرون، کندانسور سنکرون (Sychronous Condense) گفته میشود
مزایای ماشین سنکرون
تاکنون موارد زیادی در رابطه با ماشین سنکرون بیان گردید، در این بخش میخواهیم به شکلی فهرستوار مزایای ماشین سنکرون را نام ببریم:
- امکان کنترل ضریب قدرت (پس فاز، پیش فاز، واحد).
- تلفات پایین و بازده بالا (بیش از 90%).
- داشتن فاصله هوایی بیشتر نسبت به ماشین القایی (پایداری مکانیکی بالاتر).
- عدم حساسیت نسبت به نوسانات ولتاژی.
- امکان بهرهبرداری بهعنوان کندانسور سنکرون (جبرانکننده توان راکتیو).
- داشتن سرعت ثابت و مناسب کاربردهای دقیق.
- امکان راهاندازی با سرعتهای پایین و کنترل جریان راهاندازی.
- وجود رابطه خطی میان ولتاژ و میدان الکترومغناطیسی
- عملکرد عالی در هر دو مد موتوری و ژنراتوری (بر خلاف ماشین آسنکرون).
معایب ماشین سنکرون
و اما معایب این ماشین:
- در حالت موتوری به راهانداز نیازمند است.
- به دو نوع ولتاژی متفاوت (DC و AC) نیازمند است که تامین آن مشکل میباشد.
- سرعت چرخش روتور ثابت بوده و برای کاربردهای سرعت متغیر مناسب نیست.
- قفل شدن تحت بار زیاد و نیاز به راهاندازی مجدد.
- قیمت بهازای هر کیلووات بیشتر از ماشین القایی تمام میشود.
- به دلیل صفر بودن گشتاور راهاندازی امکان استارت تحت بار امکانپذیر نیست.
- نیازمند جاروبک و رینگهای لغزان بوده که باعث افزایش هزینههای نگهداری میشود.
- این نوع موتور برای کارهایی که نیازمند استارت و استاپهای مکرر و یا گشتاور راهاندازی بالا میباشند مناسب نیست.
شین بینهایت
احتمالاً شما هم واژه “شین بینهایت” را شنیدهاید، این واژه عمدتاً برای شبکههای قدرت که در آنها ژنراتورهای سنکرون بکار رفته است مورد استفاده قرار میگیرد. به همین دلیل تصمیم گرفتیم برای یک بار هم که شده Infinitive Bus و ارتباط آن را با ژنراتور سنکرون بیان نماییم.
ژنراتورهای سنکرون سهفاز عمدتاً به سیستم قدرت متصلاند و بندرت بهتنهایی بارهای خاص و محلی را تامین میکنند. درصورتیکه ژنراتورهای سنکرون سهفاز به شبکه قدرت وصل باشند و مشترکاً بار مشترکین را تامین میکنند. در این صورت اصطلاحاً میگویند که ژنراتورها به شین بینهایت وصلاند. ازآنجاییکه تعداد ژنراتورهای متصل به شبکه زیاد بوده و اندازه این ژنراتورها نسبتاً بزرگ و حجیم است، لذا ولتاژ و فرکانس شین بینهایت بهسختی قابل تغییر است و ثابت میباشد. مصرفکنندهها (بار) از نقاط مختلف شین بینهایت توسط انشعابهایی تغذیه میشوند.
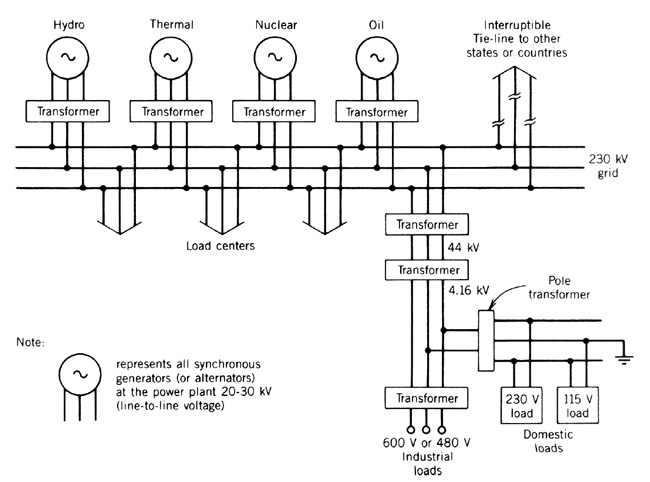
شکل (1-7) یک شین بینهایت را که گاهی نیز به آن شبکه بههمپیوسته نیز اطلاق میشود، نشان میدهد. معمولاً ولتاژ پایانههای ژنراتورهای مدرن امروز حدود 33 کیلو ولت است؛ لذا برای وصل ژنراتورها به شین بینهایت یا شبکه بههمپیوسته، از ترانسفورماتور استفاده میشود. پس از افزایش ولتاژ ژنراتورها توسط ترانسفورماتورها، این ژنراتورها توسط خطوط انتقال انرژی به شین بینهایت یا شبکه بههمپیوسته وصل میشوند. علت آن که ولتاژ خطوط انتقال انرژی بالاست آن است که بازده سیستم افزایش یابد و از تلفات کاسته گردد. همانطور که از شکل (1-7) پیداست خطوط انتقال انرژی فشار قوی از شین بینهایت یا شبکه منشعب شده تا مراکز بار (Load Centers) تغذیه نماید. در مراکز بار از ترانسفورماتورهای کاهنده استفاده میشود تا بارهای خانگی (Domestic Loads) و بارهای صنعتی و بارهای تجاری تغذیه شوند. در نیروگاه ژنراتورهای سنکرون بسته به شرایط خاص بهرهبرداری به شین بینهایت وصل و یا از آن جدا میشوند. وصل ژنراتور به شین بینهایت مقوله موازی کردن ژنراتور با شین بینهایت را مطرح میسازد.
قبل از موازی کردن ژنراتور سنکرون با شبکه، ژنراتور سنکرون باید مشخصات زیر را دارا باشد:
- هم ولتاژ شبکه یا شین بینهایت باشد.
- هم فرکانس شبکه یا شین بینهایت باشد.
- توالی فاز (Phase Sequence) ژنراتور با توالی فاز شبکه یکسان باشد.
- هم فاز شین بینهایت یا شبکه باشد.

در نیروگاهها چک کردن صحت شرایط فوق توسط دستگاهی به نام سنکروسکوپ (Synchroscope) انجام میپذیرد. وضعیت عقربه در این دستگاه اختلاف فاز ولتاژ ژنراتور و ولتاژ شبکه را نشان میدهد. جهت حرکت عقربه نشان میدهد که ژنراتور بسیار سریع و یا بسیار آرام میچرخد. بهعبارتدیگر این امر مشخص میسازد که آیا فرکانس ژنراتور بیشتر یا کمتر از شبکه میباشد؟
باید دانست مسئله چک کردن توالی فازها توسط این دستگاه امکانپذیر نیست و قبل از موازیسازی باید حتماً این امر مورد تأیید قرار گرفته باشد، زیرا خطرات جبرانناپذیری را به دنبال خواهد داشت. هرگاه عقربه خیلی آرام حرکت مینمود، (بهعبارتدیگر فرکانسها تقریباً یکساناند) و به نقطه اختلاف فاز صفر رسید (وضعیت عمودی در جهت بالا) در این هنگام با دریافت اجازه از دیسپاچینگ مرکزی مدارشکن (دژنکتور) را میبندیم و ژنراتور را به شبکه بینهایت وصل مینماییم.
آزمایش سنکروسکوپ توسط سه لامپ نیز قابل اجراست و علاوه بر همسانی فرکانس امکان بررسی توالی فاز، ولتاژ و هم فازی ولتاژها نیز فراهم است

تفاوت ماشین سنکرون و آسنکرون
تفاوت میان موتور سنکرون و القایی در مواردی همچون؛ نوع آنها، لغزش (s)، منابع تغذیه، اسلیپ رینگها و جاروبک، هزینه ساخت، بازده، ضریب توان، جریان تغذیه، سرعت، راهانداز خودکار، تاثیر پذیری گشتاور از ولتاژ و کاربردها به چشم میخورد.
تمام این موارد در جدول زیر با توضیحات آورده شده است:
| موضوع مورد تفاوت | موتور سنکرون | موتور آسنکرون |
|---|---|---|
| نوع | براش لس، رلوکتانس، سوئیچ رلوکتانس، هیسترزیس | موتور القایی AC |
| لغزش | نداشته و برابر صفر است | داشته و مخالف صفر است |
| منبع تغذیه دوم | DC برای تغذیه روتور | ندارد |
| اسلیپ رینگ و جاروبک | Slip Ring و brushes نیاز دارد | نیاز ندارد |
| هزینه ساخت | پرهزینه | کم هزینه |
| بازده | بیشتر از آسنکرون | بازده پایین |
| ضریب توان | امکان تغییر (سلفی – خازنی – مقاومتی) | تنها سلفی – پس فاز |
| جریان تغذیه | ثابت و تاثیر ناپذیر از بار | متغیر و تاثیر پذیر از بار |
| خود راه انداز | خود راه انداز نیست | خود راه انداز می باشد |
| تاثیرپذیری گشتاور | تغییر ولتاژ تاثیری در گشتاور ندارد | تغییر ولتاژ تاثیر در گشتاور دارد |
| کاربردها | نیروگاه، کارخانه ها، کنترلر ولتاژ و توان راکتیو | پمپ، فن، نساجی، کمپرسور و آسانسو |
شبیهسازی ماشین سنکرون در سیمولینک متلب
در این بخش در ابتدا نگاهی خواهیم داشت به کلیات ماشین سنکرون و پس از آن این ماشین را در قالب دو پروژه مجزا در نرمافزار سیمولینک متلب شبیهسازی خواهیم نمود.
دانلود فیلم آموزش شبیه سازی ماشین سنکرون در متلب – Full HD | با حجم 200 مگابايت
دانلود پروژههای انجام شده در متلب | با حجم 67 کیلوبايت
آنچه که در این ویدیو خواهید دید:
مروری بر ماشین سنکرون، مرور معادلات مهم، شبیهسازی ابتدایی ماشین سنکرون، پروژه ماشین سنکرون و کنترل آن با فیدبک، تغییرات دلتا و معنای آن، بررسی Excitation System.
سؤالات متداول ماشین سنکرون
منابع
[1] پی سی سن، ماشین های سنکرون سه فاز. در: ماشین های الکتریکی: تحلیل، بهره برداری، کنترل. ترجمه: مهرداد عابدی، محمد تقی نبوی. ویرایش دوم. تهران: نشر بصیر؛ 1392
[2] Christopher Cooper, The Truth about Tesla: The Myth of the Lone Genius in the History of Innovation, Quarto Publishing Group USA – 2015, page 93
[3] Thompson, Sylvanus P., Dynamo-Electric Machinery. p. 7
[4] Jill Jonnes, Empires of Light: Edison, Tesla, Westinghouse, And The Race To Electrify The World, Random House – 2004, page 47
[5] Donald Scott McPartland, Almost Edison: How William Sawyer and Others Lost the Race to Electrification, ProQuest – 2006, page 135
[6] Thompson, Sylvanus P. “Milestones:Alternating Current Electrification, 1886”. IEEE Global History Network
[7] Milestones:Alexanderson Radio Alternator, 1904″. IEEE Global History Network. IEEE
[8] «طرح سیاهبیشه – معرفی». شرکت توسعه منابع آب و نیروی ایران
[9] “The first storage pump power plant of the country was put into operation in the presence of 1st Vice President Dr. Es’haq Jahangiri“. Iran Water and Power Resources Development Co
[10] P.C.SEN, Principles of electric machines and power electronic. Third edition, Wiley
[11] James G Stallcup, Stallcup’s Generator, Transformer, Motor and Compressor, page 15-13, Jones & Bartlett, 2012 ISBN 1-4496-9519-1
[12] Michael A. Laughton (2003), “19.2.5 Reluctance motors”, Electrical Engineer’s Reference Book, Newnes, p. 19/8, ISBN 978-0-7506-4637-6
[13] Fitzgerald, A. E.; Charles Kingsley Jr.; Alexander Kusko (1971). “Chapter 11, section 11.2 Starting and Running Performance of Single-phase Induction and Synchronous Motors, Self-starting Reluctance Motors”. Electric Machinery, 3rd Ed. USA: McGraw-Hill
[14] Gottlieb, Irving M. (1997). Practical electric motor handbook, 2nd Ed. USA: Newnes. pp. 73–76. ISBN 978-0-7506-3638-4
[15] Mehri, Darius (18 September 2000). “Belts lift performance“. DesignNews.com
[16] R. Islam; I. Husain; A. Fardoun; K. McLaughlin. “Permanent-Magnet Synchronous Motor Magnet Designs With Skewing for Torque Ripple and Cogging Torque Reduction“. Industry Applications, IEEE Transactions on. 2009
[17] H.E. Jordan, Energy-Efficient Electric Motors and Their Applications, page 104, Springer; 1994
[18] Fitzgerald, A. E.; Charles Kingsley Jr.; Alexander Kusko (1971). “Chapter 11, section 11.2 Starting and Running Performance of Single-phase Induction and Synchronous Motors, Self-starting Reluctance Motors”. Electric Machinery, 3rd Ed. USA: McGraw-Hill
[19] David Finney, Variable Frequency AC Motor Drive System, page 32, IEE, 1988
[20] N.E. Nilsson, J. Mercurio, “Synchronous generator capability curve testing and evaluation“, IEEE Transactions on Power Delivery, 1994
خوشحال خواهیم شد اگر شما نکته و یا تجربهای در مورد ماشین سنکرون داشتهاید با ما در بخش نظرات درمیان بگذارید
راستی! برای دريافت مطالب جديد در پیج اینستاگرم PowreEn عضو شويد.








سلام
یه سوال داشتم
ژنراتور سنکرون قبل از اینکه به شبکه وصل بشه اگر دور رو تغییر بدهیم فرکانس خروجی تغییر میکنه اگر جریان تحریک اش رو تغییر بدهیم ولتاژ خروجی تغییر میکنه ولی وقتی که به شبکه وصل میشویم دیگر با تغییر دور و تغییر جریان تحریک ، فرکانس و جریان خروجی تغییر نمیکنن چه آیتم های تغییر میکنند
سلام
نه اینکه اصلا تغییر نمیکنه چرا تغییر می پذیره ولی کم و البته جریان تحریک ولتاژ رو تغییر نمیده توان راکتیو رو تغییر میده
سرعت روی ولتاژ و فرکانس تاثیر میذاره که از جایی که اسمش سنکرون هست همیشه تحت سرعت ثابت داره می چرخه
سلام مهندس میشه پاسخ این سوال رو بگین یا اگه کسی میدونه بگه /. یک موتور سنکرون قطب برجسته باری را تامین میکند. ناگهان تحریک آن قطع میشود اما موتور کماکان به کار خود بدون مشکل ادامه میدهد. چطور همچین چیزی ممکن است ؟
سلام
خیلی ساده به دلیل نقص قانون بقای انرژی امکان پذیر نیست
عالی بوود .تمام مطالب درس ماشین مخصوص یجا مطالعه کردم دست همگی درد نکنه برای این مطالب ناب که جمع آوری کردید.
سلامت و موفق باشید
هه هه ماشین مخصوص یه ترم گذروندم الان تو یه ساعت کامل دوره شد کاش زودتر بودید.
عالی بووود
مهندس جان از شما و تیم خوبتون تشکر می کنم
خواهش میکنم موفق باشید
ممنون از شما…امکان داره این مطالب رو بصورت فایل ورد یا پی دی اف جهت دانلود قرار بدین؟؟
سلام
اینجا براتون فهرست شناور گذاشتیم
ولی برخی سایت ها هستند لینک میدید پی دی اف تحویل می دهند
بسیار کامل
ماشین 3 و ماشین مخصوص دوره شد
سپاس فراوان
ممنون از شما