سیمولینک تغییرات بار روی موتور DC شنت
-
آپدیت شده در :
در زمینه سیمولینک متلب برخی تمارین مطرح در کتاب های بین المللی که در اکثر دانشگاه های دنیا تدریس می شوند وجود دارند که نه تنها از لحاظ سیمولینک مهم هستند اند بلکه اثباتی از دروس و مفاهیم تدریس شده در طول تحصیل می باشند، برخی از تمرینات کتاب “تحلیل ماشین های الکتریکی و سیستم های محرکه” نوشته: پال سی کراوز یا کراوس از این دست هستند.
پیشنهاد ویژه
به شما پیشنهاد می کنیم حتما از آموزش سیمولینک متلب (جامع ترین آموزش شبیه سازی در نرم افزار متلب) دیدن نمایید.
تصمیم گرفتیم که هر از چندگاهی به سیمولینک و تحلیل این نوع تمارین بپردازیم تا شما نیز با مشاهده این تحلیل ها و داشتن فایل سیمولینک بتوانید درک جامع تری از ماشین های الکتریکی داشته باشید.
برای شروع قرار است به شبیه سازی تغییرات دینامیکی بار بروی موتور DC شنت بپردازیم که یکی از تمرین های کتاب “Analysis Of Electric Machinery And Drive Systems” می باشد.
تحلیل طراحی سیمولینک
برای تحلیل ما به یک موتور DC، یک نمایشگر و المان های ورودی نیازمند هستیم؛ همانگونه که مطلع هستید در سیمولینک متلب تقریبا تمام ماشین های الکتریکی به صورت یک بلوک از قبل طراحی شده است و آماده بهره برداری هستند، البته شاید سوال پیش بیاید که طراح متلب چگونه این موتور را طراحی کرده و در اختیار شما قرار داده است!؟
پاسخ این سوال را در درس “تئوری جامع ماشین های الکتریکی” در مقطع ارشد خواهید دانست که بیان می شود؛ هر ماشین الکتریکی را می توان به صورت مجموعه ای از بلوک دیاگرام ها ترسیم نمود.
توضیحات بیشتر در مورد بلوک دیاگرام
ماشین DC یا هر ماشین دیگری مسلما از تعداد زیادی فرمول تشکیل شده است، خوب کار مشخص است؛ شما کافیست این معادلات را که معمولا به صورت غیرخطی هستند در متلب با بلوک های جمع، تفریق، ضرب و تقسیم و گاها مشتق و… شبیه سازی نمایید، در نهایت شما تعدادی ورودی و خروجی خواهید داشت و این دقیقا همان ماشین(موتور یا ژنراتور) می باشد؛ به این صورت که ورودی شما؛ ولتاژ و جریان ورودی و خروجی موتور؛ گشتاور و سرعت خواهد بود جالب است نه!
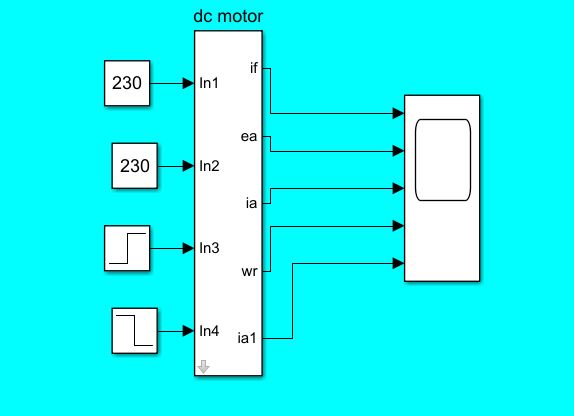
ما به دلیل اینکه هدفمان آموزش می باشد بلوک دیاگرام را به صورت کامل ترسیم کرده ایم که در زیر نیز آمده است.

ادامه طراحی
- ورودی ها را به بلوک دیاگرام(موتور DC) وصل کرده و خروجی ها هم که از موارد زیر می باشند را به یک اسکوپ (نمایش دهنده نمودار)؛
جریان تحریک If
ولتاژ آرمیچر ea
جریان آرمیچر Ia
سرعت موتور Wr
گشتاور بار(برای مشاهده تغییرات ناگهانی بار) Tl
آموزش ویدیویی:
در زیر می توانید آموزش باز کردن فایل سیمولینک(دانلود در انتهای مطلب) را به همراه “اجرا” شبیه سازی مشاهده نمایید.
هدف مسئله
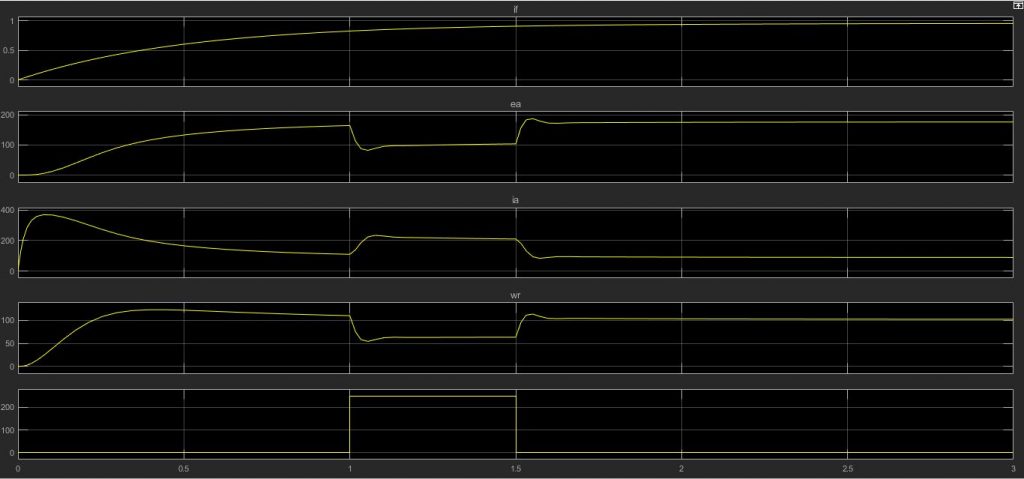
قرار است یک موتور DC شنت را بدون بار راه اندازی کنیم و سپس پس از چند لحظه بار ناگهانی(بصورت پله ای) زیادی (200N.M) بروی آن قرار دهیم و ببینیم چه اتفاقی برای موتور ما خواهد افتاد.
اجرای پروژه
به راحتی پس از وارد شدن به محیط سیمولینک متلب باید فایلی که برای دانلود در اختیار شما قرار داده ایم را دانلود نمایید، و بعد بروی دکمه سبز رنگ “اجرا” در بالا کلیک نمایید.
نتایج خروجی
پس از اجرای شبیه سازی بروی اسکوپ سمت راست دوبار کلیک نمایید، اگر نتایج شما و نموادرهای تراز(از چارت بیرون زده اند) نیستند تنها کافیست با ابزار Scale Y Axis Limit آنها را مرتب نمایید. (آیکون آن به صورت دو فلش هست)
تحلیل نهایی سیمولینک
ابتدا شرایط راه اندازی بدون بار
جریان آرمیچر
همانگونه که در تصویر نتایج مشاهده می فرمایید موتور در هنگام راه اندازی Ia (جریان مسیر آرمیچر) زیادی طلب کرده است که تقریبا دو برابر حالت کار عادی آن می باشد، دقت داشته باشید که این موتور بدون راه انداز است ولی مقاومت آرمیچر را بالا گرفته ایم که در نهایت جریان راه اندازی معقول به نظر بیاید در حالی که در واقعیت و یا شبیه سازی سطح بالاتر از درایو برای کاهش جریان راه اندازی استفاده می گردد در روش ما مسلما تلفات بالا بوده و راندمان نهایی کم می باشد ولی چون هدف آموزشی می باشد از این مورد صرف نظر می کنیم.
سرعت موتور
از طرفی سرعت Wr در هنگام راه اندازی کم بوده و به مرور زیاد می شود که این مورد به معنای بالا بودن گشتاور (T) راه اندازی می باشد که یکی از نکات مثبت موتور DC به صورت کلی بخصوص نوع سری آن گشتاور بالای راه اندازی می باشد که باعث شده در سیستم های حمل و نقل(مترو، اتوبوس شهری و…) مورد استفاده قرار بگیرد.
ولتاژ آرمیچر
ولتاژ آرمیچر نیز رفته رفته از صفر افزایش می یابد که دقیقا همان چیزیست که مدنظر ماست.
جریان تحریک
جریان تحریک نیز افزایش یافته و به سمت مقدار پایدار خود می رود.
سپس اعمال بار ناگهانی
در ساب اینتروال 3 (از 1 ثانیه به بعد در تصویر نتایج) مشاهده می کنید که موتور از حالت بی باری خارج شده و به صورت ناگهانی باری با مقدار 200N.M به آن اعمال گشته است در زیر تغییرات به وجود آمده را بررسی می نماییم:
سرعت
در لحظه وارد شدن بار، سرعت تحت تاثیر قرار گرفته و مشخصا کاهش خواهد یافت، البته به دلیل اینکه موتور DC شنت می باشد و کنترل سرعت خوبی دارد شاهد افت شدید سرعت نیستیم حتی در چند لحظه پس از افت سرعت همانگونه که در تصویر مشاهده می نمایید سرعت مقداری افزایش یافته است! و سعی کرده به سمت پایداری برود. در عمل نیز هرگاه نیاز به سرعت ثابت و قرار به انتخاب یک موتور DC باشد از موتور دی سی شنت استفاده می شود زیرا تقریبا سرعت ثابتی را به شما ارائه می نماید(ضبط صوت و… ).
ولتاژ آرمیچر
طبیعیست که باید شاهد کاهش این ولتاژ باشیم زیرا سرعت کاهش یافته و در نهایت بروی این ولتاژ تاثیر خواهد گذاشت، علت را می توان در معادله این ولتاژ نیز دید که عبارت است از: e:WLafIf
جریان آرمیچر
موتور DC اصولا در برابر تغییرات گشتاور همواره سعی می کند واکنشی خوب داشته باشد به همین دلیل موتور از منبع ورودی جریان بیشتری طلب کرده تا پاسخگوی بار باشد، هرچند در این ساب اینتروال شاهد حالت راه اندازی(افزایش ناگهانی جریان و مجددا کاهش) هستیم که با توجه به ثابت بودن بار در نوع خود جالب توجه است.
جریان تحریک
در این شبیه سازی شاهد پایداری نسبی جریان تحریک هستیم، هرچند در زمان تغییر بار افزایش جریان تحریک را شاهد هستیم ولی این مورد به قدری نیست که چشمگیر و یا جلب توجه نماید.
نتیجه گیری
در این پست با همدیگر به نوعی حالت گذرای راه اندازی یک موتور دی سی شنت را اثبات کردیم و از سویی دیگر عکس العمل موتور را تحت بار خارجی بررسی کردیم که نتایج نیز با آنچه که انتظار داشتیم یکی بود. امیدوارم از تمرین با سیمولینک متلب لذت برده باشید و در آینده بتوانیم با یکدیگر تمرین های مهم و اصولی دیگری را نیز انجام و بررسی کنیم.
 دانلود مستقیم فایل سیمولینک تغییرات بار روی موتور DC شنت | با حجم 1 مگابایت
دانلود مستقیم فایل سیمولینک تغییرات بار روی موتور DC شنت | با حجم 1 مگابایت
دانلود مستقیم ویدیو نحوه ی باز کردن و ران سیمولینک موتور HD – DC | با حجم 8 مگابایت
![]() پسورد : www.poweren.ir
پسورد : www.poweren.ir
راستی! برای دریافت مطالب جدید در کانال تلگرام PowerEn عضو شوید.








سام ببخشید پاسخ سوال من داده نشده است هنوز . خواهشمندم پاسخ فرمایید
سلام پاسخ داده شده است کافیست صفحه را رفرش کنید
سلام ببخشید اینکه شما می فرمایید با گشتاور 1000 موتور ناپایدار هست برای رفع ناپایداری چه باید کرد آیا باید پارامترهای شبیه سازی در سیمولینک را تغییر داد یا نه ؟ چه کنیم تا با گشتاور 1000 سرعت منفی نشود؟؟ ممنوم اگه راهنمایی فرمایند
این عدد خیلی بالاست در دنیای واقعی! باید موتورتون رو تقویت کنید شبیه سازی اوکی هست داره میگه این موتور جواب گوی این بار شمانیست
سلام ببخشید چرا وقتی گشتاور بار TL رو 1000 می کنیم Wr چرا منفی میشود این علت چیست آیا شبیه سازی و پارامتر ها اشکال درد یا نه؟؟ خواهش می کنم پاسخ فرمایید.
سلام آقای مهندس ببخشید علت این که اگه گشتاور بار را وقتی 1000 می کنیم در بازه زمانی مشخص مان چرا سرعت ولتاز القایی منفی میشود علت چیست؟؟
سلام
یعنی موتور شما ناپایدار میشه و جواب گو بار نیست
چه طور میشه آقای مهندس ناپایداری موتور رو برطرف کرد تا جواب گو بار های خیلی زیاد مثلا 1000 هم باشه ؟ باید پارامترهای سیمولینک و شبیه سازی رو عوض کرد یا نه؟
سلام خسته نباشید.تو سیمولینک واسه تولید شکل موج سینوسی فرکاسشو که زیاد میکنم شکل خروجی دیگه سینوسی نیست؟به نظر شما مشکل چیه؟ممنون
سلام
این موضوع به خیلی از موارد بستگی دارد و به این صورت که شما می فرمایید کلی نیست.
مثلا چه مواردی؟چطوری رفع میشه؟برای یه شکل موج ساده هم همین مشکل هست.من یک اسکوپ وصل میکنم به یک بلوک sine vave بازم همینطوره
حالت کلی شبکه، سایر المان های پروژه، بارها، هارمونیک انتقالی و ….
پروژه شما چی هست؟
سلام خسته نباشید خدا قوت.نرم افزار pscad چرا بلوک MOSFET نداره؟
سلام متاسفانه دلیلش رو نمی دونم