ماشین القایی (Induction Machine) چیست
-
آپدیت شده در :
در این مقاله قصد داریم ماشین القایی (عمدتاً موتور القایی) را بهصورت کامل بررسی کنیم، در ابتدا خلاصهای از توضیحات ساده موتور القایی را بیان کردهایم و سپس بهصورت تخصصی در فایل PDF “ماشین القایی چیست” که در انتهای پست جهت دانلود قرار گرفته است به بررسی این نوع ماشین پرکاربرد پرداختهایم. برای شروع از شما دعوت میکنیم در ابتدا ویدیوی زیر را مشاهده کرده تا بهصورت ۳ بعدی دید بهتری از این موتور الکتریکی داشته باشید.
دانلود فیلم ماشین القایی چیست – Full HD | با حجم ۱۳۲ مگابايت
موتور القایی در دسته موتورهای متناوب (AC) قرار میگیرد. نام دیگر این موتور، آسنکرون (غیر همزمان) بوده که در مقابل آن موتورهای سنکرون قرار گرفته است. توان موردنیاز در قسمت متحرک این موتور از طریق القای الکترومغناطیسی تامین میشود. موتورهای القایی AC پرکاربردترین موتورهایی هستند که در سامانههای کنترل حرکت صنعتی و همچنین خانگی به کار گرفته میشوند. طراحی ساده و پایدار، بهای ارزان، هزینه نگهداری پایین و اتصال آسان و کامل به یک سرچشمه نیروی AC برتریهای بنیادی این ماشین الکتریکی هستند. انواع گوناگونی از موتورهای القایی AC در بازار وجود دارد. موتورهای گوناگون برای کارهای مختلف ساخته شدهاند. با اینکه طراحی موتورهای AC آسانتر از موتورهای DC است ولی کنترل سرعت و گشتاور در انواع مختلف موتورهای القایی AC نیازمند دریافتی ژرفتر در طراحی و ساخت این نوع موتورهاست.
برای کنترل سرعت و گشتاور موتور القایی نیازمند بهکارگیری یک درایو الکتریکی میباشیم.
یک موتور الکتریکی در روتور خود انرژی الکتریکی را به انرژی مکانیکی تبدیل میکند. برای تامین توان موردنیاز روتور راههای مختلفی وجود دارد. در یک موتور DC توان آرمیچر مستقیماً بهوسیله یک منبع جریان مستقیم تامین میشود درحالیکه در یک موتور القایی این توان از طریق استاتور در روتور القا میشود. موتورهای القایی را به علت شباهت بسیار زیاد آنها به ترانسفورماتور، ترانسفورماتور دوار نیز مینامند چرا که استاتور این موتورها از نظر عملکرد شباهت زیادی به سیمپیچ اولیه و روتور آنها به سیمپیچ ثانویه ترانس دارد. از موتورهای القایی بهویژه موتورهای القایی سهفاز به طور گستردهای در صنعت استفاده میشود.
قدرت بالا، ساختار ساده، عدم وجود جاروبکها (تعمیرات سادهتر) و قابلیت بالای موتورهای القایی برای کنترل سرعت از جمله دلایل استفاده از آنهاست.
اولین موتور القایی در سال ۱۸۸۲ (۱۲۶۱ ه.ش) توسط نیکولا تسلا در فرانسه اختراع شد اما در سال ۱۸۸۸ (۱۲۶۷ ه.ش) و پس از مهاجرت تسلا به ایالات متحده به طور رسمی ثبت شد. اولین موتور القایی روتور قفسی یک سال بعد توسط میخاییل دولیوو دوبرولسکی در اروپا اختراع شد. پیشرفتهای تکنیکی در زمینه تولید این موتورها تا جایی ادامه یافت که در سال ۱۹۷۶ (۱۳۵۵ ه.ش) موتور القایی با قدرت خروجی ۱۰۰ اسب ساخته شد. امروزه پرکاربردترین موتورهای القایی را موتورهای روتور قفس سنجابی تشکیل میدهند.
دانلود فیلم نحوه عملکرد موتور ۳ فاز القایی – HD | با حجم ۱۰۰ مگابايت
اصول عملکرد و مقایسه با موتورهای سنکرون
بزرگترین تفاوت بین یک موتور القایی AC و یک موتور سنکرون AC در آن است که در موتور سنکرون توان روتور به طور مستقیم از یک منبع خارجی تامین میشود. این جریان در روتور نیز، خود میدان مغناطیسی تولید خواهد کرد و به دلیل اثر متقابل میدانهای استاتور و روتور، روتور در جهت میدان دوار استاتور به حرکت در خواهد آمد.
از طرف دیگر در موتور القایی برای القای جریان در روتور، اختلاف سرعتی بین سرعت میدان دوار و سرعت گردش روتور به وجود میآید. در غیر این صورت میدان دوار نسبت به روتور امکان حرکت نخواهد داشت و هادیهای روتور شار میدان تولید شده توسط استاتور را قطع نکرده و در نتیجه ولتاژی در روتور القا نخواهد شد. این اختلاف سرعت بین سرعت میدان دوار و سرعت حرکت روتور در اصطلاح لغزش (Slip) نامیده میشود. لغزش یک مؤلفه بدون واحد است. ازآنجاکه در موتورهای القایی اختلاف سرعت شرط و ضرورت عملکرد آنهاست به این موتورهای غیر همزمان یا آسنکرون میگویند.
انواع موتور القایی
براساس تعداد فازها:
- موتور القایی سهفاز (خود راه انداز)
- موتور القایی تکفاز (غیر خود راه انداز)
بر اساس نوع روتور:
- موتور القایی روتور قفسی
- موتورالقایی روتور سیمپیچی شده
فرمولهای ماشین القایی
مهمترین رابطه در موتورهای القایی رابطه بین فرکانس منبع (f)، تعداد زوج قطبها (p) و سرعت میدان دوار (ns) است: ![]()
و از این رابطه خواهیم داشت:

و سرعت روتور برابر است با:

s نشاندهنده لغزش (Slip) است و از این رابطه به دست میآید:

در موتورهای سنکرون سرعت روتور همیشه برابر سرعت میداندوار است و از رابطه ![]() به دست میآید.
به دست میآید.
ساختار
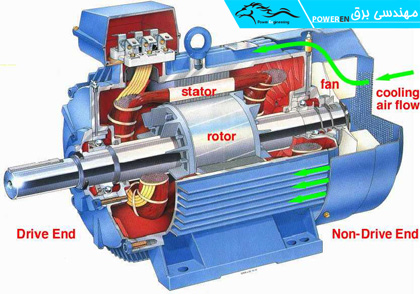
مانند بیشتر موتورها، موتور القایی AC یک قسمت ایستای بیرونی به نام استاتور و یک گردان که در درون آن میچرخد و روتور نامیده میشود، به همراه دارد که میان آن دو یک فاصله کوتاه و یکنواخت (فاصله هوایی – Air gap) وجود دارد. بهصورت کلی همه موتورهای الکتریکی از میدان مغناطیسی چرخان برای گرداندن روتورشان بهره میگیرند. موتور سهفاز القایی AC تنها نوعی از موتور است که در آن میدان مغناطیسی چرخان بهصورت کاملاً ذاتی از سوی استاتور و بهخاطر طبیعت تغذیهگر آن ایجاد میگردد این در حالی است که در موتورهای DC به وسیلهای الکتریکی یا مکانیکی برای آفریدن این میدان چرخان نیازمندیم.
یک موتور القایی AC تکفاز نیازمند یک ابزار الکتریکی بیرونی برای پدیدآوردن این میدان مغناطیسی چرخشی میباشد و به همین دلیل در درون هر موتور دو سری آهنربای مغناطیسی پیشبینیشده است. در یک موتور القایی AC، یک سری از مغناطیس شوندهها بهخاطر اینکه تغذیه AC به پیچههای استاتور متصل است در استاتور پیشبینیشدهاند و بهخاطر طبیعت متناوب تغذیه ولتاژ AC بر پایه دستور لنز (قانون Lenz)، نیرویی الکترومغناطیسی و گردان میسازد (درست همانند ولتاژی که در ثانویه ترانسفورماتور واداشته میشود) بنابراین سری دیگر از مغناطیس شوندهها خاصیت مغناطیسی پیدا میکنند، اندرکنش میان این آهنرباها و میدانهای مغناطیسی سبب ایجاد یک میدان چرخش شده که در نهایت این میدان چرخشی، رتور ماشین القایی را با سرعتی خاص به چرخش درمیآورد.
استاتور

استاتور موتورهای القایی از قطبهای سیمپیچی شدهای تشکیل شده که با گذر جریان از آنها با تولید میدان مغناطیسی در روتور ولتاژ القا میکنند. استاتور از چندین نوار باریک آلومینیوم یا آهن سبک ساخته شده، این نوارها بهصورت یک استوانه تهی به یکدیگر متصل شده و درنهایت در جای خود ثابت شدهاند در ادامه سیم پیچهایی از سیم روکشدار در این شیارها جاسازی شدهاند که هر گروه پیچه با هستهای که آن را فراگرفته یک آهنربای مغناطیسی (با دو پل) را برای کارکردن با تغذیه AC میسازد. تعداد قطبهای یک موتور القایی AC به اتصال درونی پیچههای استاتور بستگی دارد این پیچههای استاتور مستقیماً به منبع انرژی متصل شده و بهگونهای بسته شدهاند که با تغذیه AC استاتور، یک میدان مغناطیسی چرخنده به وجود آید، با این شرایط تعداد قطبها باتوجهبه سرعت و گشتاور موردنیاز میتواند مختلف باشد ولی تعداد آنها همواره یک عدد زوج است.
روتور
قسمت گردان از چندین بخش باریک فولادی که میانشان میله هایی از مس یا آلومنیوم تعبیه شده، ساخته شده است. روتور موتورهای القایی به دو صورت است:
- روتور قفس سنجابی
- روتور سیمپیچی شده

در رایجترین نوع روتور (روتور قفس سنجابی) این میلهها در پایانه خود بهصورت الکتریکی و مکانیکی توسط حلقههایی به همبسته شدهاند. کمابیش ۹۰% از موتورهای القایی دارای روتور قفس سنجابی میباشند و این بهخاطر آن است که ساختار این مدل پایدار و ساده است. در قفس سنجابی شکافهایی تعبیه شده که هر شکاف یک میله مسی یا آلومینیومی یا آلیاژی را در برگرفته و در این میلهها به طور همیشگی از سوی زنجیرههای پایانی آنها اتصال کوتاه (Short Circuit) شدهاند. چون این نوع مونتاژ درست همانند قفس سنجابی میباشد این نام برای آن در نظر گرفته شده است. میلههای گردان دقیقاً با چرخگاه موازی نبوده و مقداری نیز مورب در نظر گرفته میشوند این مسئله دو دلیل عمده دارد که در ادامه به آنها پرداخته میشود؛
۱. این تغییر شکل سبب کاهش هارمونیک و اثرات آن شده و درنهایت علاوه بر کاهش ولتاژها و نیروهای مزاحم باعث افزایش تلفات و سروصدا میگردد.
۲. دلیل دوم آن است که گرایش روتور به چفت شدن (Hang)، کمتر میگردد به این صورت که دندانههای روتور به دلیل جذب مغناطیسی مستقیم، میکوشند که در برابر دندانههای استاتور باقی بمانند (ایجاد حالت اینرسی). این اتفاق هنگامی رخ میدهد که شمار دندانههای روتور و استاتور برابر باشند.
روتور توسط مهارهایی در دو سر چرخگاه نگهداشته شده است؛ بین استاتور و رتور شکافی هوایی موجود است. این فاصله هوایی مسیری برای انتقال میدان مغناطیسی و نیروی حاصله از آن میباشد که درنهایت سبب چرخش رتور میگردد.
به دلیل مزایای بالای روتورهای قفسی سنجابی (Squirrel-cage) مانند؛ سادگی، هزینه کمتر، نیاز کمتر به تعمیر و نگهداری و … اغلب در صنعت شاهد نوع سنجابی میباشیم. روتورهای سیمپیچی (Wound rotor) شده در صنعت کاربردهای خاص خود را دارند و بیشتر در موتورهایی که نیاز به گشتاور راهاندازی بالایی دارند مورداستفاده قرار میگیرند.
رایجترین روتورها در موتورهای القایی، روتورهای قفس سنجابی میباشند
دانلود فیلم معرفی و بررسی انواع موتور تکفاز القایی – Full HD | با حجم ۹۸ مگابايت
کنترل سرعت
سرعت چرخش میدان دوار در موتورهای القایی تابع فرکانس منبع و تعداد قطبهای استاتور میباشد، همه این موارد در مرحلههای ابتدای فرآیند طراحی ماشین الکتریکی تعیین میگردند. پیش از پیشرفت المانهای الکترونیک قدرت تغییر فرکانس موتورهای القایی بهراحتی ممکن نبود و همین موضوع کاربرد این نوع موتورها را محدود میکرد تا اینکه با ظهور درایوهای الکتریکی این مشکل به شکل کامل حل شد و فروش جهانی موتورهای القایی و بهصورت کلی ماشینهای متناوب به شکل فزایندهای افزایش یافت.
روشها گوناگونی برای تغییر سرعت موتورهای القایی وجود دارد ولی رایجترین روش بهرهگیری از ترفند Pulse Width Modulation) PWM) یا آمیختگی پهنای فرکانس است، که در آن یک موج AC به طور یکنواخت و سرعتی قابل تنظیم قطع و وصل میشود. با این روش میتوان توان وروردی متوسط موتور را کنترل کرد.
دانلود فیلم ژنراتور القایی چیست – Full HD | با حجم ۱۰۸ مگابايت
راهاندازی
همانطور که گفته شد در موتورهای القایی رابطهای مستقیم بین مقدار لغزش و مقدار جریان القایی در روتور وجود دارد. بهاینترتیب بیشترین میزان جریان القایی در روتور در هنگام راهاندازی (لغزش برابر با ۱) به وجود میآید. در این حالت موتور مانند ترانسفورماتوری عمل خواهد کرد که سیمپیچ ثانویه آن اتصال کوتاه شده باشد؛ بالا بودن جریان القا شده در روتور موجب بالا رفتن جریان استاتور میشود و به همین دلیل میزان جریان راهاندازی در استاتور تقریباً بین ۵ تا ۹ برابر جریان در بار کامل است. جریان بالای موتور در لحظه راهاندازی میتواند باعث افت ولتاژ در بقیه مصرف کنندهها شود اما این جریان بالا در موتور، زیاد ادامه پیدا نمیکند چون با راه افتادن موتور، لغزش به تدریج کاهش یافته و میزان جریان استاتور نیز کاهش مییابد. در صورتی که بار موتور در لحظه راهاندازی به اندازهای باشد که موتور قادر به چرخش نباشد جریان بالا موجب سوختن سیمپیچ استاتور خواهد شد. برای جلوگیری از افزایش بیش از حد جریان در موتور از راهاندازها (درایو الکتریکی، تغییر اتصال سیمپیچها، ستاره – مثلث کردن و …) برای کاهش ولتاژ راهاندازی و محدود سازی جریان راهاندازی استفاده میکنند این راهاندازها بهگونهای طراحی شدهاند که با رسیدن موتور به سرعت متوسط ولتاژ را افزایش دهند.
شبیهسازی موتور القایی در سیمولینک متلب
در این بخش در دو پروژه مجزا موتور القایی تکفاز و سهفاز را بهصورت کامل شبیهسازی خواهیم کرد.
دانلود فیلم آموزش شبیه سازی موتور القایی در متلب – Full HD | با حجم ۲۰۳ مگابايت
دانلود پروژههای انجام شده در متلب | با حجم ۸۰ کیلوبايت
آنچه که در این ویدیو خواهید دید؛
تحلیل بارداری، انواع موتور 3 فاز القایی، راهنمای انتخاب حالت ژنراتور یا موتوری، شبیهسازی حالت اشباع، ترسیم کلی پروژه، تحلیل موتور 3 فاز، هماهنگسازی ترانسفورماتور و موتور، خروجیهای سهفاز، نمایش توان اکتیو و راکتیو لحظهای در سهفاز، بررسی توان P و Q، پروژه M فایل، نمودار گشتاور – سرعت، نوشتن حلقه While برای چک قطب، بیان کدها به زبان ساده، بررسی کدها، نگاهی به عملکرد کدها، تحلیل نهایی پروژه.
سؤالات متداول ماشین القایی
موتور القایی چگونه عمل میکند؟
هنگامیکه منبع تغذیه به استاتور یک موتور القایی سهفاز متصل میشود، یک میدان مغناطیسی گردان در فاصله هوایی تولید میشود، هادیهای روتور ثابت هستند. این هادیهای ثابت، میدان مغناطیسی چرخان استاتور را قطع میکنند و به دلیل القای الکترومغناطیسی، نیرومحرکه الکتریکی یا EMF در روتور القا میشود و چون مسیر هادیها در روتور بسته است شاهد جاری شدن جریان در روتور خواهیم بود، این جریان یک میدان گردان دیگر تولید میکند. اکنون دو شار داریم: شار با چگالی بالا سعی میکند هادی روتور را به سمت ناحیهای که چگالی شار آن کم است حرکت دهد. این پدیده، سبب ایجاد گشتاور در هادی شده که درنهایت چرخش روتور را به همراه خواهد داشت.
موتور القایی تکفاز چیست؟
یک موتور القایی تکفاز شامل سیمپیچ تکفاز روی استاتور و یک روتور قفس سنجابی است. هنگامیکه منبع تکفاز به سیمپیچ استاتور متصل میشود، یک میدان مغناطیسی ضرباندار تولید میشود؛ بنابراین یک موتور القایی تکفاز خود راهاندازی نمیشود و به برخی از راههای شروع خاص نیاز است این در حالی است که در موتور القایی ۳ فاز به دلیل ماهیت میدان چرخان استاتور، نیازی به راهانداز نداریم.
مزایا و معایب موتور القایی چیست؟
مزایا: ۱. سادگی در نگهداری. ۲. هزینه پایین. ۳. گشتاور بالا. ۴. امکان کنترل سرعت. معایب: ۱. عدم خود راهانداز بودن در مدل تکفاز. ۲. جریان راهاندازی بسیار بالا. ۳. ضریب توان پایین. ۴. نیازمند متد کنترلی پیشرفته. ۴. گشتاور راهاندازی پایین (قفس سنجابی).
تفاوت میان ماشین القایی (آسنکرون) و سنکرون چیست؟
ماشین سنکرون یک ماشین دو تحریکه هست، در این ماشین استاتور توسط منبع تغذیه AC و روتور با منبع DC تحریک میشوند (همین امر سبب سرعت ثابت بودن ماشین سنکرون شده است) درحالیکه ماشین القایی تک تحریکه بوده و صرفاً سیمپیچ استاتور آن با منبع AC تغذیه میگردد.
ضریب توان موتور القایی چند است و آیا در این موتور توان راکتیو تولید میشود؟
برخلاف موتور سنکرون، موتور القایی تنها مصرفکننده توان راکتیو است. ضریب توان در این موتور عمدتاً در حالت بارداری بین ۰.۸۵ تا ۰.۹۰ بوده و در حالت بیباری هم تقریباً ۰.۲ میباشد.
دانلود مقاله بررسی تخصصی ماشینهای القایی | با حجم ۱ مگابايت
راستی! برای دريافت مطالب جديد در پیج اینستاگرم PowreEn عضو شويد.








من چنتا از اموزشهاتونو دیدم خیلی عالی توضیح دادید خصوصا وجود تصاویر وکلیپ حین توضیح دادن فهم رو اسونتر کرد .برای خودم همیشه انواع موتور وشکلو شمایلشون واصطلاحات سنکرون اسنکرون خود القا و… سوال بود .تشکر فراروان …
۱۷۵۳۸۵۴۷۰۹۳۷۴۱۱۰۳۵۸۳۹۵۷۴۳۳۳۵۹۲۷۰۱۸۰
سلام یه سوال داشتم
چرا جهت حرکت رتور با میدان دوار مغناطیسی یکی است مگه نباید طبق قانون لنز با عامل بوجود اورنده خودش مخالفت کنه و در جهت مخالف بچرخه
سلام
تک فاز یا سه فاز
خیلی عالی و خیلی ساده و مهفومی توضیح داده بودید. واقعا متشکرم.
خواهش میکنم
موفق باشید
سلام خدا قوت
سلام
ممنون از شما
ببخشیدیه سوال دقیقافاصله بین رتورواستاتورچقدرهستش
تقریبا 1 تا 1.5 میلی متر