جزوه موتورهای پله ای
-
آپدیت شده در :
-
بدون دیدگاه
تاکنون جزوه ای در زمینه موتورهای پله ای در وب سایت قرار نگرفته است به همین دلیل تصمیم گرفتیم در این زمینه نیز مواردی جهت آموزش در وب سایت قرار دهیم. در جزوه موتورهای پله ای مواردی همچون؛ انواع موتورهای پله ای، بررسی رلوکتانس متغیر، آهنربای دائم، هیبرید، سیم پیچ های موتور پله ای، سیم پیچ تک رشته ای (Unifilar)، سیم پیچ دو رشته ای (Bifilar)، مدهای پله، ملاحظات طراحی، ارتباطات سری و موازی و بسیاری موارد دیگر در 71 صفحه مطرح شده اند.
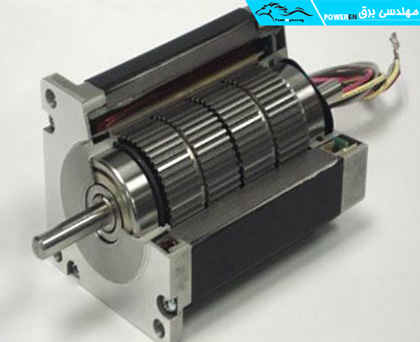
استپر موتور

یک استپ موتور چرخش زاویه ای گسسته یا پله ای دارد و با اتصال به ضربان هایی در فرکانسی خاص کار می کند. هر ضربان فرستاده شده به موتور سبب حرکت محور موتور تا زاویه ای معین می شود که این زاویه، زاویه استپینگ (Stepping Angle) نامیده می شود.
موتور پلهای را میتوان جز گروه سیستمهای محرکه بدون جاروبک به حساب آورد. کاربرد اصلی این نوع موتور در سیستم تثبیت و سیستم تنظیم موقعیت حلقهباز است. موتورهای پلهای از نوع AC هستند و فرمان ورودی به شکل پالسهای الکتریکی است.
اصول کارکرد
موتورهای DC زغالی زمانی که ولتاژ به ترمینال های آنها تزریق میگردد به نرمی حرکت میکنند. استپ موتور به وسیله قابلیت تبدیل پالس های ورودی به فواصل کوچک مشخص در موقعیت شفت شناخته میشوند. هر پالس شفت را به یک زاویه مشخص میبرد. استپ موتورها اساساً دارای دندانههای مغناطیسی در اطراف یک شفت مرکزی از جنس آهن میباشند. الکترومغناطیس ها به وسیله یک مدار راه انداز خارجی یا یک میکروکنترلر تغذیه میگردند.
جهت چرخاندن شفت ابتدا به یکی از مغناطیسها توان داده میشود، که مغناطیس باعث جذب دندانههای دنده میگردد. زمانی که دندانه دنده روبروی اولین مغناطیس میایستد، نسبت به مغناطیس بعدی دارای یک فاصله میباشد. این به معنای آنست که در صورت روشن شدن الکترومغناطیس بعدی و خاموش شدن اولی دنده به آهستگی میچرخد تا دندانه روبروی مغناطیس دوم قرار گیرد. از آنجا فرایند آغاز میگردد. هر یک از این چرخش ها یک گام (استپ) نامیده میشود، تعداد مشخصی از این گام ها یک دور کامل موتور را میسازند (دقت شود نسبت تعداد گام ها به دور موتور همواره یک عدد صحیح است). و به این ترتیب یک موتور میتواند با زوایای مشخص بچرخد.
نحوه عملکرد موتورهای پله ای
طراحی موتور پله ای به شکلی است که در آن یک روتور درونی، شامل آهن رباهای دائمی، توسط دسته ای از آهن رباهای خارجی که به صورت الکترونیکی روشن و خاموش می شوند، کنترل می گردد. موتورهای پله ای می توانند با هر سرعتی ، به هر جهت و به هر مقدار که کاربر تعیین می کند، بچرخند. در موتورهای پله ای، موقعیت آهن ربای داخلی توسط سیم پیچ های اطراف کنترل می شود. با تحریک شدن سیم پیچ ۱a ، روتور به سمت این سیم پیچ جذب می شود، سپس سیم پیچ ۱b تحریک می شود و روتور به اندازه ی ۹۰ درجه می چرخد تا جذب این سیم پیچ شود، به همین ترتیب با تحریک سیم پیچ های ۲a و ۲b روتور به طور متوالی خواهد چرخید. چنانچه عبور از چهار سیم پیچ اطراف یک آهن ربا، در چهار مرحله به ترتیب شکل کنترل شود، چرخش پله ای آهن ربا مشاهده خواهد شد؛ به همین دلیل این نوع موتورها را پله ای می نامند. گفتنی است که در واقعیت چرخشهای ۹۰ درجه ایجاد نمی شوند و موتورهای پله ای موجود از دقت بسیار بالاتری برخوردارند. بالا بودن دقت در موتورهای پله ای به علت دندانه های ایجاد شده در درون آنهاست.
برای راه اندازی یک موتور پله ای باید یک سری از پالس های زمان بندی شده به ترتیب خاصی به سیم پیچ های موتور اِعمال شود. بنا به ترتیب این پالس ها و زمان بندی گفته شده، موتور در جهت مورد نظر و با سرعت خواهد چرخید.
انواع استپ موتورها
چهار نوع اصلی از استپ موتورها وجود دارد:
- استپ موتورهای با مغناطیس دائم
- استپ موترهای با مقاومت مغناطیسی متغیر
- استپ موتورهای سنکرون هایبرید
- استپ موتورهای لاوت LAVET TYPE
- موتور پله ای با روتور مغناطیس شونده
این نوع از موتورها در مقایسه با دو نوع دیگر، از ساختار داخلی ساده تری بر خوردارند. از آنجا که روتور این موتور از ماده ای مغناطیس شونده ساخته شده است، با اعمال یک ولتاژ DC به سیم پیچ های اِستاتور، دندانه های روتور به سمت قطب الکترومغناطیس ایجاد شده جهت گیری می کنند و این جهت گیری باعث چرخش محور موتور می شود.
موتور پله ای مغناطیس دائم
این نوع موتور جزو ارزانترین و کم دقت ترین موتورهای پله ای می باشند. به دلیل طراحی خاص روتور این نوع موتورها، قطب های N و S در کنار یکدیگر و به صورت موازی روی استوانه ای قرار گرفته اند. روتور با توجه به جهت الکترو مغناطیسی اِستاتور، می چرخد تا رو به روی آن قرار گیرد.
موتورهای پله ای هیبرید
موتورهای پله ای هیبرید (Hybrid)، در حقیقت، ترکیبی از ساختار موتورهای پله ای با روتور مغناطیس شونده ومغناطیس دائم می باشند. مرکز روتور در این نوع موتورها دارای قطبهای S است و دندانه های روتور، قطبهای N می باشند.
روتور موتورهای مغناطیس دائم(PM) از مغناطیس های دائم تشکیل گردیده است و با جاذبه و دافعه بین مغناطیس روتور و مغناطیس استاتور عمل مینماید. موتورهای با مقاومت مغناطیسی متغیر از یک صفحه آهنی به عنوان روتور استفاده گردیده و بر این اساس عمل مینماید که حداقل مقدار مقاومت مغناطیسی، زمانی که روتور در حال جذب به سمت قطب های استاتور است، زمانی رخ میدهد که حداقل فاصله وجود دارد. گروه سوم را به این دلیل هایبرید مینامند که در ساختار آنها از دو تکنیک مغناطیس دائم و مقاومت مغناطیسی متغیر با هم، جهت رسیدن به حداکثر توان در کوچکترین فضا استفاده شدهاست
استپ موتورهای دو فاز
دو نوع سیم پیچی جهت هستههای مغناطیس استپ موتورهای دو فاز وجود دارد: تک قطبی و دوقطبی.
موتورهای تک قطبی
یک موتور تک قطبی دارای سیم پیچی با سر مرکزی میباشد. جریان در هر قسمت از سیم پیچ جهت ایجاد میدان مغناطیسی برقرار میگردد. در این آرایش، قطب های مغناطیسی بدون تغییر در جهت جریان میتوانند معکوس گردند، بنابراین کموتاسیون در مدار به راحتی صورت میگیرد (به عنوان مثال با یک ترانزیستور). اساساً، هر فاز، دارای یک سر مرکزی مشترک است: سه سیم برای هر فاز و شش سیم برای یک موتور دو فاز. اغلب سر مشترک هر دو فاز با هم یکی شده و بنابراین هر موتور دارای پنج سیم میباشد. به همین دلیل این موتورها را تک قطبی مینامند زیرا توان همواره از طریق همین قطب وارد میگردد.
یک میکروکنترلر یا کنترلر استپ موتور میتواند جهت فعالسازی ترانزیستورهای راه انداز در مسیر درست استفاده گردد. این عملکرد موتورهای تک قطبی باعث محبوبیت آنها گردیدهاست، این راحتترین راه جهت یک حرکت زاویهای است.
(به وسیله اندازهگیری مقاومت دو سر سیم پیچ ها میتوان آنها را شناسایی نمود. مقاومت بین سیم سر وسط و سیم انتهای کویل نصف مقاومت دو سیم انتهایی کویل میباشد) یک راه سریع جهت تست صحت عملکرد استپ موتور، اتصال کوتاه کردن دو سر کویل ها و سعی در چرخش شفت است، هر زمان که مقاومتی بیش از مقاومت نرمال احساس گردید نشانگر بسته بودن مدار آن سیم پیچ مشخص است و نشانه عملکرد صحیح فاز است.
موتورهای دوقطبی
موتورهای دوقطبی دارای یک سیم پیچ در هر فاز میباشند. جهت معکوس کردن قطب های مغناطیسی جریان در یک سیم پیچ بایستی معکوس گردد، بنابراین مدار راه انداز پیچیدهتر میباشد، و اساساً با یک آرایش پل H بدست میآید. (البته مدارات راه انداز زیادی برای این موضوع وجود دارد). دو سیم برای هر فاز وجود دارد و هیچ سر مشترکی وجود ندارد.
در صورتی که فرکانس اعمالی به استپ موتور بیش از فرکانس پاسخگویی موتور باشد باعث افزایش اثر اصطکاک ساکن میگردد.
به دلیل استفاده بهتر از سیم پیچ ها، توان موتورهای دوقطبی نسبت به موتور تک قطبی هم وزن خود بیشتر است. این به دلیل فضای فیزیکی اشغال شده توسط سیم پیچ ها است. یک موتور تک فاز دارای دوبرابر سیم بیشتر در حجم یکسان است اما نصف توان نقطه به نقطه در هر زمان را ارائه میدهد که به معنای تأثیر گذاری ۵۰٪ یا حداکثر ۷۰٪ است. با وجود آنکه موتور دو قطبی جهت راه اندازی پیچیدهتر است اما فراوانی تراشههای راه انداز به معنی آنست که دستیابی به این سیستم چندان هم سخت نیست.
یک استپ موتور ۸ سیمه مانند یک موتور تک قطبی است اما سیم ها به سر مشترک وصل نیستند.
این نوع سیم پیچی موتور به چند شکل قابل استفاده است:
- تک قطبی
- دوقطبی با سیم پیچی سری. این امر باعث ارائه اندوکتانس بالاتر و جریان پایینتر در هر سیم پیچ میگردد.
- دو قطبی با سیم پیچی موازی. این امر نیاز به جریان بالاتر دارد اما میتواند باعث کاهش و بهینه شدن اندوکتانس گردد.
- دوقطبی با یک سیم پیچ در هر فاز. این روش باعث راه اندازی موتور با نصف سیم پیچ قابل دسترس میگردد که باعث کاهش گشتاور سرعت پایین با جریان مورد نیاز کمتر میگردد.
با اندازهگیری مقاومت بین سیم ها میتوان این دو نوع موتور را از هم تشخیص داد. اگر دو سیمی که اندازهگیری مینمایید مربوط به دو کویل مجزا باشند مقاومت بینهایت دیده میشود.
مانند سایر موتورها، استپ موتورها نیز به توانی بیش از آنچه میکروکنترلرها تأمین مینمایند نیاز دارند بنابراین به یک منبع تغذیه مجزا نیازمندید. به صورت ایدهآل بایستی ولتاژ اعلام شده توسط کارخانه سازنده را بدانید اما در صورت عدم اطلاع، یک منبع تغذیه DC متغیر را به دو سیم یک کویل اعمال نمایید، از ولتاژ حداقل ۳V آغاز نمایید و به تدریج آن را افزایش دهید تا زمانیکه موتور بسختی به نظر میرسد آماده حرکت است. بیش از آن ولتاژ اعمال ننمایید چون باعث آسیب به موتور میگردد. اساساً ولتاژ مورد نیاز موتورها ۵V, 9V, 12V, 24V است و بالاتر از ۲۴Vبسیار نادر است.
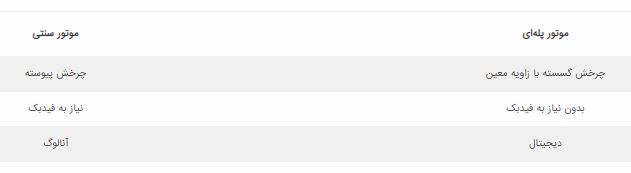
مقایسه با موتورهای سنتی
در جدول زیر موتور پلهای با موتورهای سنتی بهطور کلی مقایسه شدهاست:
مزایا
- کنترل دیجیتالی ساده
- فاقد خطای تجمعی
- توقف ناگهانی بدون آسیب
- بدون جاروبک
- بدون نیاز به فیدبک
- پایدار
- ساختمان مکانیکی ساده
- راهاندازی ساده و ارزان
معایب
- توان خروجی محدود
- دوران با پله ثابت
- قادر به تغذیه بار با اینرسی زیاد نیست
- پرش و نوسان زیاد
- راندمان کم
- نحوه کنترل موتور پله ای
این موتور به صورت ۱ بیتی یا دو بیتی حرکت می کند در حالت یک بیتی در هر لحظه تنها یک سیم پیچ پالس ۱ را دریافت می کند و در حالت دو بیتی دو سیم پیچ در هر لحظه پالس ۱ را دریافت می کنند اگر این دریافت پالس به صورت منظم و پشت سر هم انجام شو د موتور نیز به صورت صحیح به سمت جهت حرکت عقربه های ساعت یا خلاف جهت آن حرکت خواهد کرد.
نحوه کنترل ۱ بیتی

در حالت یک بیتی اگر اول سیم پیچ ۱ را تحریک کنیم. سیم پیچ ۲و۳و۴ بدون تحریک باید باشند جهت حرکت موتور پله ای در سمت حرکت عقربه های ساعت بعد از سیم پیچ ۱ نوبت سیم پیچ ۲ است که تحریک شود.، و در این حالت نیز بقیه سیم پیچها بدون تحریک هستند بعد از آن نوبت سیم پیچ ۳ و سپس نوبت سیم پیچ شماره ۴ است دقت کنید که در هر لحظه یک سیم پیچ تحریک شو د اگر بعد از سیم پیچ ۱ سیم پیچ ۴ را تحریک کنیم و سپس به سراغ۳و۲ برویم موتور در جهت عکس عقربه های ساعت خواهد چرخید.
نحوه کنترل ۲ بیتی

در حالت دو بیتی در لحظه دو سیم پیچ بار دار می شوند مثلا اگر اول سیم پیچ ۱ و۲ تحریک شوند بعد سیم پیچ ۲و۳ سپس ۳و۴ و در نهایت ۴ و ۱ برای حرکت موتور پله ای بایست همین ترتیب را تا زمانیکه می خواهید موتور حرکت داشته باشد ادامه دهید حال اگر این ترتیب را عوض کنید موتور در خلاف جهت فعلی حرکت می کند.
راستی! برای دريافت مطالب جديد در پیج اینستاگرم PowreEn عضو شويد.







