انکودر (Encoder) چیست
-
آپدیت شده در :
-
بدون دیدگاه

انکودر یکی از المانهای بسیار پرکاربرد در اتوماسیون صنعتی میباشد که بهصورت کلی در بخش سنسورها قرار میگیرد، ما با استفاده از انکودر توانستهایم در بحث کنترل دقت و امکانات بیشتر کنترلی را در دست بگیرم.
آنچه که در این نوشتار خواهید خواند:
- تعریف انکودر
- عملکرد انکودر
- رزولوشن انکودر
- انواع انکودر
- کاربرد انکودر
- مزایا و معایب انکودر
امروز میخواهیم در ابتدا به تعریف انکودر بپردازیم که دقیقاً چیست و چه کاربردی دارد سپس به عملکرد کلی آن میپردازیم تا ببینیم چگونه یک چشمهٔ نوری میتواند برای ما قطار پالسی بسازد پس از آن با نگاهی به تعریف رزولوشن به سمت انواع انکودر خواهیم رفت و در این بخش انکودرها را از دید تکنولوژی، ساختمان، شفت و سیگنال خروجی خواهیم شناخت، در این قسمت شما را با انواع انکودر بهصورت کامل آشنا خواهیم نمود.
سپس به سراغ کاربردهای متنوع انکودر از سرو موتور تا انواع اندازهگیریها خواهیم رفت تا بهصورت ملموس با جایگاه آن در صنعت آشنا شوید. در پایان نیز کار را با بررسی فهرستوار مزایا و معایب آن به پایان خواهیم برد.
قبل از ورود به بررسی اجازه دهید کار را با دیدن یک کلیپ کوتاه در مورد معرفی انکودر شروع نماییم، بدین ترتیب شما را به دیدن این کلیپ کوتاه که توسط تیم PowerEn به فارسی ترجمه و زیرنویس شده است دعوت مینماییم.
فیلم (بهزودی)
تعریف انکودر
انکودر (Encoder) در واقع یک سنسور اتوماسیون است، سنسوری که در آن حرکات دورانی یا خطی را برای ما بهصورت دیجیتالی رمزنگاری میکند تا بتوان حالات حرکت (موقعیت، مسیر، سرعت و شمارش) را برای دستگاههای کنترلی نظیر PLC قابلفهم نماید. در ادامه دستگاه کنترلکننده از این سیگنال برگشتی استفاده کرده و عکسالعمل موردنظر سیستم را تعیین میکند به همین دلیل در برخی منابع به آن “رمزگذار” نیز گفته میشود.
اگر بخواهیم از دید کاربردی آن را تعریف کنیم یک وسیله فیدبک سنج (feedback) است که با استفاده از آن میتوان یک سیستم حلقه بسته (close loop) ایجاد کرد.
به بیان دیگر انکودر حسگری است که به محور چرخدنده یا موتور وصل میشود و میتواند میزان چرخش را اندازهگیری کند. با اندازهگیری میزان چرخش میتوان مواردی همچون؛ جابهجایی، سرعت، شتاب یا زاویه چرخشی را تعیین کرد.
انکودر سنسوری است که قابلیت تبدیل حرکت مکانیکی (خطی و دورانی) به سیگنال الکتریکی (دیجیتال یا آنالوگ) را دارا است.
به طور کلی وظیفه اصلی انکودر گرفتن بازخورد از حرکت دستگاهها و تبدیل آن به یک داده قابلاستفاده برای سیستمهای کنترلی و پردازشگرهاست.[1]
عملکرد انکودر

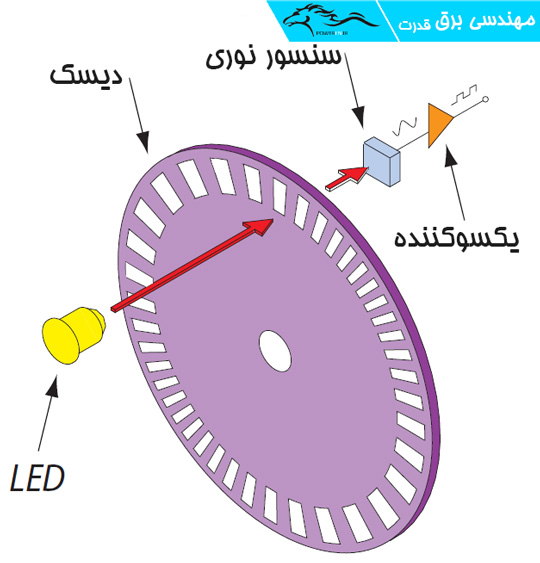
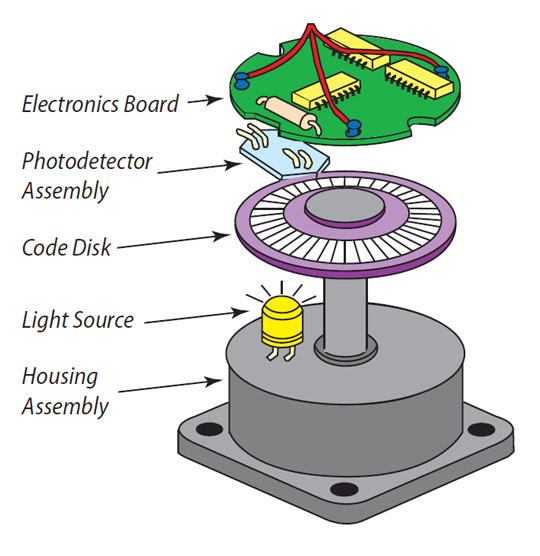
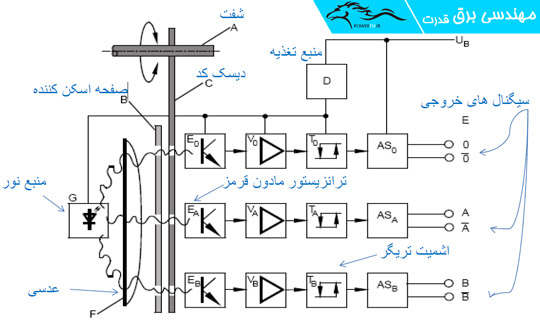
هر انکودر یک سازوکار برای تشخیص حرکت دارد مثلاً در نوع نوری آن از یک اشعهٔ نوری که از میان یک صفحهٔ دیسک مانند عبور میکند استفاده میشود تا حرکت سنجیده شود.
انکودر نوری دارای صفحهای شیاربندی شده است، این صفحهٔ دیسک مانند، بر روی خود دارای شیارهایی باریک است که طول آنها و فاصلهشان از یکدیگر الگوی مشخصی دارد (تقریباً چیزی مشابه پرههای یک چرخدنده).
این پرتو از طریق دیسکی که خطوط مات با یک الگوی خاص دارد و تا حدودی شبیه به پرههای چرخ است، عبور میکند. در طرف دیگر دیسک، یک سنسور نوری قرار دارد که بر اساس الگوی موجود بر روی دیسک، نور ارسالی از منبع تولید نور را دریافت میکند.
سپس پالسهای نور به یک سیگنال الکتریکی تبدیل میشوند تا از طریق خروجی انکودر به سیستم کنترلی نظیر؛ PLC یا DCS ارسال شود.
هنگامیکه دیسک حرکت میکند اشعه به طور متناوب قطع و وصل شده و یک خروجی پالس که تعداد پاسهای آن متناسب با زاویهای است که دیسک گردش کرده است تولید خواهد شد.
بدین ترتیب دقت انکودر با تعداد شیارهای روی دیسک نسبت مستقیم دارد. مثلاً برای دیسکی با ۶۰ شیار، ازآنجائیکه هر دور ۳۶۰ درجه است، حرکت از یک شیار به شیار دیگر ۶ درجه (۳۶۰ تقسیمبر ۶۰) میباشد.[2]
رمزگذارها یا انکودرهای موجود در بازار معمولاً دارای ۱۰ تا ۱۲ شیار میباشند و هرچه تعداد این شیارها بیشتر باشد دقت انکودر بیشتر خواهد بود.
رزولوشن انکودر
رزولوشن (Resolution) یک معیار سنجش کیفیت در انکودر است که قبل از اینکه به سراغ انواع انکودر برویم باید آن را تعریف کنیم.
به تعداد پالسی که در ازای یک دور چرخش کامل توسط انکودر تولید میگردد رزولوشن انکودر گفته میشود و هر چه این عدد بالاتر باشد معمولاً دقت تجهیز بالاتر و گرانتر خواهد بود.
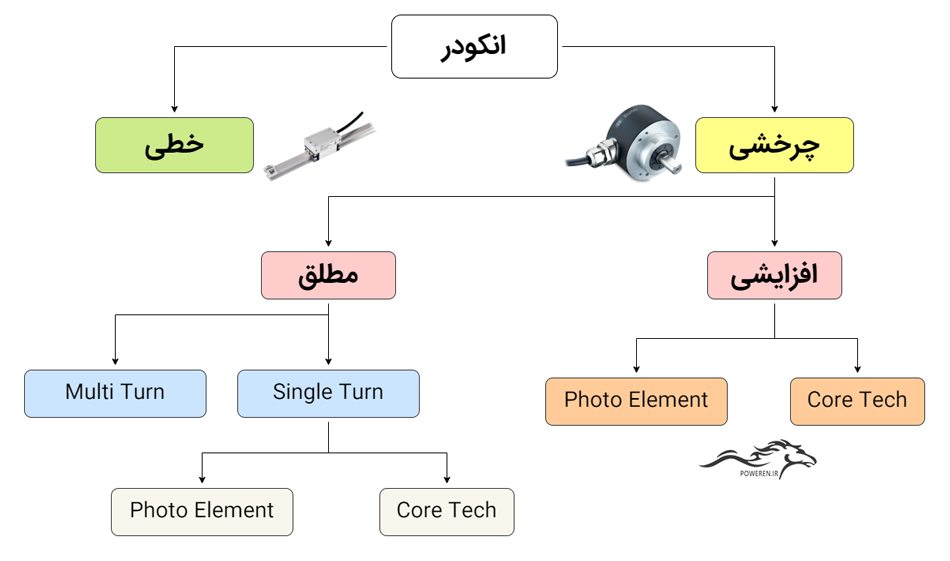
انواع انکودر
انکودرها را میتوان به روشهای مختلفی دستهبندی کرد، این دستهبندی میتواند از دید؛ تکنولوژی ساخت، ساختمان، سیگنال خروجی، شفت و … باشد.
در ادامه به بررسی انواع Encoder به شکلهای مختلف خواهیم پرداخت.
انواع انکودر از دید تکنولوژی ساخت
این دستهبندی یکی از مهمترین دستهبندیها است چراکه در آن بهوضوح نوع تکنولوژی ساخت مشخص میگردد، احتمالاً در انتخاب یک انکودر مناسب این بخش باید در ابتدا مدنظر قرار گیرد.
انکودر نوری (Optical)
انکودرهای نوری با استفاده از یک یا دو جفت الایدی کار میکنند. بهاینترتیب که نور تابانده شده توسط صفحهای دایرهای سیاهوسفید قطع و وصل میشود. سیگنال الکتریکی متناسب با نور قطع و وصل شده تولید میشود. انکودرهای نوری، رایجترین و دقیقترین نوع انکودرها هستند.
در انتخاب انکودرهای نوری باید به حفاظتهای آن در برابر شرایط محیطی از جمله گردوغبار و لرزش دقت کرد. چراکه این عوامل عملکرد این انکودرها را دچار اختلال میکند.[3]
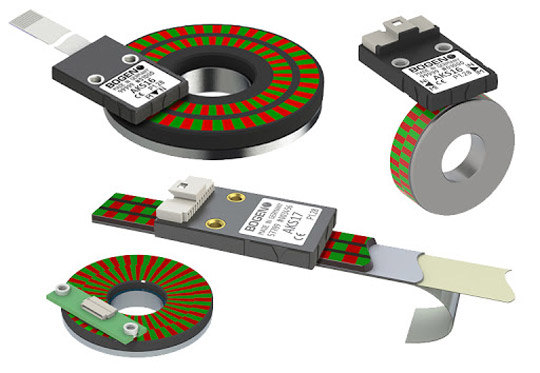
انکودر مغناطیسی (Magnetic)
انکودرهای مغناطیسی سیستم تشخیص سیگنال را بر اساس تغییر شار مغناطیسی ایجاد شده توسط آهنربا (یک یا چند جفت قطب) که در چرخش جلوی یک سنسور قرار دارند، بکار میگیرند. معمولاً آهنربا در شفت انکودر قرار میگیرند. تغییر میدان مغناطیسی توسط سنسور نمونهبرداری شده و به پالس الکتریکی تبدیل میشود.
مزیت اصلی انکودرهای مغناطیسی عدم تماس در سیستم تشخیص آنهاست که به جلوگیری از سایش کمک میکند؛ بنابراین از نظر هزینه بسیار مناسب هستند، زیرا به تعمیر و نگهداری نیاز ندارند و از دوام مناسبی برخورداراند.
انکودرهای مغناطیسی مخصوصاً برای کاربردهای سنگین که نیاز به استحکام بالا، سرعت و طیف گستردهای از دما دارند، مناسب هستند. این انکودرها در عین حال از اطمینان بسیار خوبی در تولید سیگنال برخوردارند.
انکودرهای مغناطیسی از انکودرهای نوری مقاومترند و اغلب در محیطهای در معرض آلودگی، بخار، لرزش و سایر انواع تداخلهای محیطی استفاده میشوند بااینحال قدرت تفکیک (Resolution) یا دقت انکودرهای نوری بالاتر میباشند. در انکودر مغناطیسی شیارهای شفافی که در انکودر نوری وجود دارند با سنسور مغناطیسی قابل تشخیص هستند.
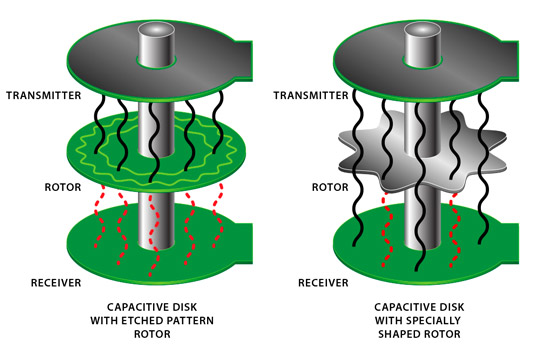
انکودر خازنی (Capacitive)
انکودر خازنی از تغییر در مقدار ظرفیت خازن بهعنوان ابزاری برای اندازهگیری جابهجایی بهره میبرد. به طور معمول المانهای اصلی سنسور خازنی بهگونهای تنظیم میشوند که خازن بهعنوان یک عنصر متحرک نسبت به صفحات ثابت خازن حرکت کند.
انکودرهای خازنی در دنیای صنعت نسبتاً تازهوارد محسوب میشوند. انکودرهای خازنی از نظر نیرومندی مانند مدلهای مغناطیسی هستند ولی قدرت تفکیکپذیری انکودرهای نوری از انکودرهای خازنی بالاتر است. البته انکودرهای خازنی بدون توجه به نوع تکنولوژی مورداستفاده قابلیت تشخیص حرکت و تبدیل آن به سیگنالهای استاندارد رایج در صنعت را دارا هستند.
انکودر مکانیکی (Mechanical)
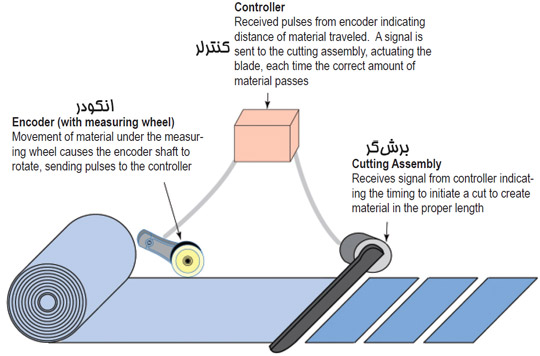
انکودرهای مکانیکی که با نامهای دیگری چون انکودر چرخدار، کالسکهای و ویل انکودر (wheel encoder) شناخته میشوند، بسته به محلی که مورداستفاده قرار میگیرند، میتوانند دارای یک یا دو المان مکانیکی (یا چرخ مکانیکی) باشند. کاربرد این انکودرها اندازهگیری طول یا سرعت هدفی است که به طور پیوسته در حال حرکت است.
بهصورت کلی عملکرد انکودر کالسکه در واقع مشابه با عملکرد انکودر افزایشی است با این تفاوت که دو عدد چرخ بر روی آن سوار شده است. کاربرد انکودر کالسکه در صنایعی مانند صنایع کاشیسازی است که مثلاً هر بهازای هر یک متر، قرار است سنگ برش بخورد. باید به این نکته توجه کرد که دقت انکودر کالسکهای برخلاف انکودر افزایشی، بر اساس پالس نیست بلکه بر اساس میلیمتر، سانتیمتر و یا متر است. مثلاً انکودر کالسکهای با دقت یک میلیمتر، بهازای هر یک میلیمتری که طی میشود یک پالس میاندازد.

در هنگام خرید انکودر چرخدار پارامترهایی نظیر: وزن انکودر، ولتاژ تغذیه، ابعاد انکودر، دقت اندازهگیری، جنس و شکل چرخها، ضد تکانه و لرزش بودن، داشتن قابلیت برنامهریزی و … را مدنظر قرار دهید.
انکودرهای دیگری مانند مقاومتی، جریان گردابی و … نیز موجود هستند که نسبت به انکودرهای بالا سهم کمتری از بازار را در دست دارند به همین دلیل از آنها چشمپوشی میکنیم.
انواع انکودر از دید ساختمان
این دستهبندی تقریباً ساده بوده و به دو بخش کلی: انکودر خطی (Linear Encoder) و انکودر چرخشی (Rotary Encoder) تقسیم میگردد.
انکودر خطی (Linear Encoder)
این نوع از انکودرها برای سنجش موقعیت کاربرد دارند. در واقع چنانچه حرکتی که انکودر حس میکند از نوع خطی باشد، انکودر خطی نامیده میشود. این دسته از سنسورها در دو حوزه عمده کاربرد دارند؛ اندازهگیری و سیستمهای حرکتی. از جمله کاربردهای این سنسورها میتوان به کولیسها و دستگاههای CNC اشاره کرد.
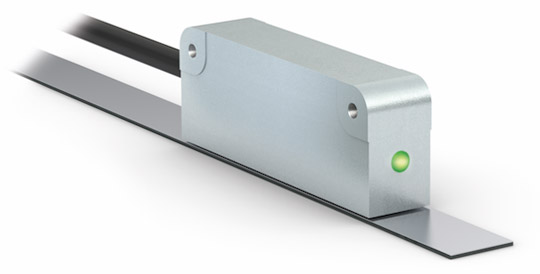
به انکودرهای خطی، خط کش پالسی یا خط کش دیجیتالی نیز گفته میشود. این انکودرها مشابه انکودرهای افزایشی هستند با این تفاوت که بهجای استفاده از صفحه دایرهایشکل در آنها از یک خط مستقیم استفاده میشود. دقت اندازهگیری در این انکودرها با استفاده از فاصله بین سوراخها تعیین میشود. بهعنوانمثال اگر فاصله بین سوراخها ۰.۱ میلیمتر باشد، دقت این انکودر هم برابر با ۰.۱ میلیمتر است، یعنی بهازای هر ۰.۱ میلیمتر حرکت، انکودر یک پالس را ثبت میکند.
تکنولوژیهای ساخت انکودر خطی عبارتاند از: نوری، القایی، مغناطیسی، خازنی و جریان گردابی.
توجه داشته باشید که انکودر خطی مدل نوری دارای خروجی دیجیتال و انکودر خطی مدل مغناطیسی و مقاومتی دارای خروجی آنالوگ است.
انکودر چرخشی (Rotary Encoder)
این نوع انکودرها بهصورت الکترومکانیکی موقعیت و زاویهٔ یک شفت را به یک کد آنالوگ و دیجیتال تبدیل میکند.
این نوع انکودر به طور معمول از یک یا دو جفت LED فرستنده و گیرنده و یک دیسک مدرج (سیاهوسفید یا جای خالی و جای پر) استفاده میکند. دیسک مدرج مابین سنسورهای فرستنده و گیرنده قرار دارد و این مجموعه بر روی محور چرخان دستگاه مستقر است. هنگام چرخش شفت، دیسک مدرج همراه با شفت میچرخد و سنسورهای فرستنده و گیرنده ثابت میمانند. بهاینترتیب سیگنالی که از سمت فرستنده به گیرنده ارسال میشود توسط چرخش دیسک به طور متوالی قطع و وصل میشود. به این صورت ما در خروجی گیرنده یک قطار از پالسهای متوالی صفر و یک منطقی خواهیم داشت. این پالسها همان کدهایی هستند که انکودر تولید میکند و برای اینکه تبدیل به موقعیت و یا تعداد دوران شفت شود به ورودی یک دیکودر داده میشود و طبق برنامهای که به دیکودر داده شده است، این پالسها به موقعیت تبدیل میشود. هر چه تعداد نقاط سیاهوسفید روی دیسک مدرج بیشتر باشد، تعداد این صفر و یکهای منطقی در یک دوران ۳۶۰ درجه بیشتر و در نتیجه دقت اندازهگیری بیشتر میشود.

به این دسته از انکودرها، شفت انکودر (Shaft encoder) نیز گفته میشود و در صورتی که بدون شفت باشند هالو شفت (Hollow shaft) گویند.[4]
انواع انکودر از شفت
انکودرها از نظر دارابودن شفت به دودسته شفت دار و بدون شفت تقسیم میشوند.
انکودر شفت دار
انکودرهای دارای شفت معمولاً با یک کوپلینگ به شفت موتور متصل میشوند. در این حالت نمیتوان موتور و انکودر را بهسادگی تعویض کرد، چراکه پیداکردن جایگزین دقیقاً با همان اندازه کار دشواری است. یکی دیگر از مشکلات انکودرهای دارای شفت بروز خطا در پی جابهجایی شفت انکودر نسبت به شفت موتور است.
به جز مواردی که در بالا ذکر شد، هالو شفتها مزایای دیگری نیز دارند که عبارت است از:
- عدم احتیاج به اتصالات خارجی.
- مقاومت بیشتر در برابر ضربه و لرزش.
- نصب آسان و قرارگیری در مکان زاویهای مناسب.
- اندازهگیری آسانتر سرعت باتوجهبه ساختار مناسب.
انکودر بدون شفت
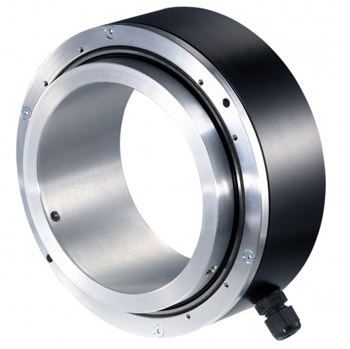
در مقابل انکودرهای بدون شفت (هالو شفت) سازگاری زیادی از نظر شکل و اندازه با محیط دارند. هالو شفتها کمحجمتر از انکودرهای شفت دار هستند و بر روی شفت موتورهای با قطر مختلف سوار میشوند.
انواع انکودر از دید سیگنال خروجی
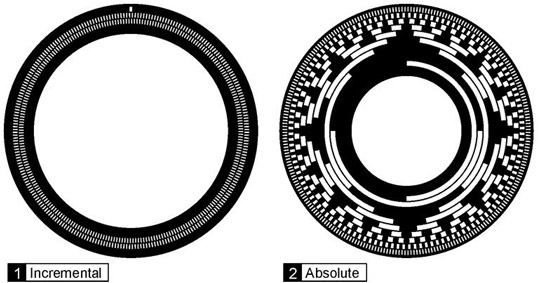
در این دستهبندی دو نماینده ویژه قرار گرفتهاند که احتمالاً نام آنها مکرراً شنیده باشید؛ انکودر افزایشی و انکودر مطلق.
انکودر افزایشی (Incremental Encoder)
این دسته از انکودرها تغییرات زاویهای را به شکل لحظهای و نسبت به مبدأ نمایش میدهد. این بدین معناست که این انکودرها تنها تغییرات موقعیتی را نشان میدهند نه موقعیت مطلق را.
انکودرهای افزایشی میتوانند دارای ۱ تا ۶ سیگنال خروجی باشند که آنها را معمولاً A، B و Z مینامند. چرخش انکودر موجب تولید پالس A و چرخش محور (شفت) موتور موجب تولید پالس B میشود. از پالس Z نیز به طور معمول بهعنوان یک نقطه مرجع دقیق استفاده میشود.
در برخی از انکودرهای افزایشی از پالسهای معکوس سه پالس بالا نیز تحت عناوین ′A و ′B و ′C استفاده میشود. سیستمهای کنترلی از انطباق پالسهای معکوس و اصلی جهت اطمینان از عدم وجود خطا در حین انتقال بهره میگیرند. به پالسهای معکوس، پالس دیفرانسیل هم گفته میشود.[5]
یکی از نمونههای کاربرد انکودر افزایشی (Incremental) در موسهای توپی است که انکودر در این تجهیز با شمارش تغییرات موقعیتی، مکان موس را تشخیص میدهد.
مزایای انکودر افزایشی
- مناسب برای شمارش پالسهای ساده یا مانیتورینگ فرکانسهایی همچون سرعت، جهت و موقعیت.
- مقرونبهصرفه و مکانیزم ساده نسبت به انکودرهای مطلق.
- اندازهگیری مغناطیسی.
- انکودرهای افزایشی دارای رزولوشن ۵۰ پالس در هر چرخش هستند (Pulses per revolution – PRP).
خروجی انکودرهای افزایشی
انکودرهای افزایشی چند نوع خروجی مختلف دارند که عبارتاند از؛
- لاین درایور (Line Driver)
- NPN open collector
- (Totem pole (push pull
خروجی لاین درایور
این خروجی یک سیگنال دیفرانسیلی است و برای هر کانال دو سیم خروجی مجزا نیاز دارد. آرایش متداول سیمها A′، A، B′، B و … است. وقتی کانال A روشن است، در واقع ولتاژ مثبتی بین A و ′A وجود دارد. همچنین زمانی که کانال A خاموش است، اختلاف ولتاژ منفی بین A و ′A وجود دارد و اندازه اختلاف ولتاژ بزرگتر از 2.5V خواهد بود. این در مورد کانالهای B و Z نیز صدق میکند. خروجیهای لاین درایور سیگنالی با کیفیت و نویز کم ایجاد میکند.
خروجی NPN open collector
این نوع خروجی از ورودیهای (PLC (PNP جریان میکشد. یک انکودر Open Collector دارای سیمهای A، B و Z و ۰ ولت است. این نوع از انکودرها گستره وسیعی از ولتاژ را میپذیرند.
خروجی توتم پل (Totem pole)
خروجی Totem pole مداری خاص است که میتواند به PLC جریان دهد یا جریان کشد. نکته مهم در مورد مدار این انکودر، استفاده از یک جفت ترانزیستور است. هنگامیکه یکی از ترانزیستورها روشن است، دیگری خاموش است.
اگر PLC جریان تزریق کند (ورودی PNP)، انکودر توتم پل میتواند از طریق ترانزیستور پایینی جریان بکشد. چنانچه PLC جریان بکشد (ورودی NPN)، انکودر توتم پل از طریق ترانزیستور بالایی جریان را تأمین کند.
انکودر مطلق (Absolute Encoder)
یک اشکال بزرگ انکودرهای افزایشی این است که شمارش پالسهای آن در یک میانگینگیر یا اکسترنال کانتر (Counter External) ذخیره میشود. اگر برق قطع شود و یا بههرحال اختلال پیدا کند، شمارش گم خواهد شد (نقطه صفر برای دستگاه به هنگام راهاندازی مجدد کم یا تعریف نشده است) این بدان معناست که چنانچه قدرت را از یک ماشین الکتریکی با انکودری که دارای چرخاننده الکتریکی است بگیریم، (به هر دلیلی ممکن است، بهخاطر تعمیرات یا هر شب بعد از ساعات کاری باشد) دیگر انکودر موقعیت صحیح را نخواهد دانست. برای حل این مشکل از انکودرهای مطلق استفاده میشود که در این صورت ماشین همیشه موقعیتش را خواهد دانست.
یک انکودر چرخشی Absolute موقعیت خود را با استفاده از نقطه رفرنس تعیین مینماید. این روش بسته به اینکه آیا انکودر Absolute نوری و یا مغناطیسی است، کمی متفاوت میباشد. اما اصل در هر دو حالت یکسان است.
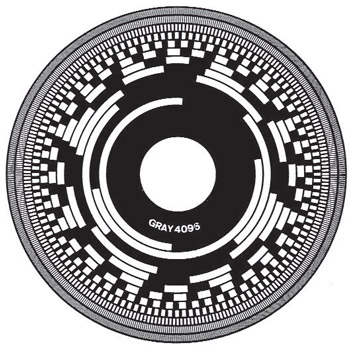
در انکودر مطلق دیسکی که دارای چندین گروه از قطعات به فرم دایرههای متحدالمرکز نقطه شروع دایرههای متحدالمرکز در مرکز دیسک انکودر چرخشی است استفاده میشود. چنانچه حلقه به سمت محیط دایره برود، هر یک از آنها دارای دوبرابر قطعه نسبت به حلقه قبلی و داخلیتر خود خواهند داشت. اولین حلقه که داخلیترین حلقههاست یک قسمت شفاف و یک قسمت تیره خواهد داشت و حلقه سوم نیز از هر یک از قطعات ۴ قسمت خواهد داشت. اگر انکودر دارای ۱۰ حلقه باشد، آخرین حلقه یا دورترین آن از مرکز دارای ۵۱۲ قطعه میباشد چنانچه هر حلقه از انکودر مطلق دارای دوبرابر قطعه از حلقه قبلی خود باشد، بین شمارهها یک سیستم باینری برقرار میشود. در این نوع انکودر بهازای هر حلقه روی دیسک یک منبع نور و دریافتکننده آن وجود دارد.
برای مثال، اگر بر روی یک دیسک ۸ ترک وجود داشته باشد، این انکودر قادر به تولید ۲۵۶ پوزیشن مجزا و یا با وضوح زاویهای از ۱.۴۰۶ درجه (۳۶۰/۲۵۶) است. رایجترین انواع رمزگذاری عددی مورداستفاده در رمزگذار مطلق کدهای خاکستری و باینری است. به هر قطاع در دایره این انکودر یک بیت گفته میشود.
انکودرها در انواع یک سیگنال، ۲ سیگنال، ۳ سیگنال و ۶ سیگنال ساخته میشوند.
نوع ۶ سیگنال آن تشکیل شده از سیگنالهای A و B و Z است. سه سیگنال بعدی سیگنالهای متمم A و B و Z هستند که این سیگنالها دقیقاً مخالف سیگنالهای A و B و Z عمل میکنند. بهاینترتیب که وقتی سیگنال A در سطح منطقی یک قرار دارد، سیگنال متمم A در سطح منطقی صفر قرار میگیرد. عملکرد سیگنالهای B′ و Z′ نیز همانند سیگنال A′ است.
باتوجهبه توضیحات گفته شده پس این نوع انکودر علاوه بر میزان جابهجایی، موقعیت را نیز به شما میدهد.
در انکودر مطلق آخرین موقعیت کاری ثبت میشود، یعنی اگر در حین کار ربات، برق قطع شود پس از اتصال مجدد ربات از نقطه قبلی شروع به کار خواهد نمود.
کاربرد انکودرهای مطلق
ازآنجاییکه انکودرهای مطلق خود اطلاعات مربوط به موقعیت مکانی را درک میکنند نیازی به الکترونیکهای خارجی برای ارائه یک شاخص پایه بهمنظور موقعیتیابی انکودر نیست. کاربردهای این انکودر عبارتاند از:
- تعیین جهت چند محور برای دستگاههای CNC مورداستفاده در تولید قطعات.
- تعیین خودکار ارتفاع تختهای خاص مورداستفاده در بیمارستانها.
- موقعیتیابی دقیق چند استابلایزر برای وسیله نقلیههای سنگین مانند جرثقیل و یا آسانسور.
- حرکت دربهای اتوماتیک.
- ادامه حرکت رباتیک حتی بعد از انقطاع قدرت.
مزایای انکودر مطلق
- حفظ و به یادآوری موقعیت بعد از خاموشی دستگاه و تداوم مانیتورینگ موقعیت.
- امکان تعیین موقعیت ماشین و امکان ذخیرهسازی دیتا الکترونیک.
- امکان استفاده از گزینههای چندگانه مانند: Serial، Parallel، Fieldbus، Ethernet و Analog.
- استفاده از اندازهگیری نوری و مغناطیسی.
- انکودرهای مطلق دارای رزولوشن ۱۶ بیت و یا ۶۵.۵۳۶ پالس در هر چرخش دارند (Pulses per revolution – PRP).
کاربرد انکودر
باتوجهبه توضیحاتی که داده شد نگفته مشخص است که انکودر کاربردهای مختلفی در صنعت دارد برخی از کاربردهای حلقه بسته (Closed Loop) عبارتاند از؛
- کنترل سرو موتور یا اینورتر (Servo or VFD Control)
- اندازهگیری سرعت (Speed Measurement)
- اندازهگیری موقعیت (Position Measurement)
- اندازهگیری زاویه (Angel Measurement)
- اندازهگیری جهت حرکت شفت (Direction Detection)
- شمارش (Counter)
در ادامه نگاهی به برخی از موارد یاد شده خواهیم داشت.
کنترل سرو موتور و انکودر
روتاری انکودرها اغلب جهت تعقیب و رهگیری موقعیت شفت موتور (در موتورهای Brush Less آهنربا دائم) مورداستفاده قرار میگیرند. این موتورها معمولاً در ماشینهای CNC، رباتها و تجهیزات صنعتی دیگر نصب هستند. انکودرهای Incremental، در سرو موتورهای القایی مورداستفاده قرار میگیرند، اما انکودرهای Absolute در موتورهای Brush Less آهنربا دائم مورداستفاده قرار میگیرند.
در این کاربردها، انکودر نقش اساسی در اطمینان از عملکرد درست تجهیز دارد. موتورهای Brush-Type، از یک کموتاتور الکترومکانیکی جهت کنترل اینکه به چه سیمپیچی برق داده شود استفاده میکنند. در موتورهای brushless، ارتباط بهصورت الکترونیکی است و انکودر درایو را جهت برقدار کردن سیمپیچ استاتور مناسب، بسته به موقعیت مگنت موتور، فعال میکند. چنانچه جریان اعمال شده به سیمپیچها، زمانی که مگنتهای روتور در یک موقعیت خاص نسبت به سیمپیچهای استاتور هستند مناسب باشد، بیشترین گشتاور قابل حصول است. چنانچه این زمانبندی درست باشد، موتور در بهترین حالت خود و اگر غلط باشد در بدترین حالت خود کار میکند. عدم تنظیم درست انکودر بر روی موتور، گاهی اوقات باعث میشود که موتور دچار وارونگی چرخش شده و شرایط خطرناک فرار موتور پیش بیاید. جهت عملکرد صحیح این موتورها، لازم است که انکودر بهصورت صحیح تنظیم شود.
کنترل سرعت اینورتر با انکودر

شما تصور کنید که قصد کنترل سرعت یک موتور الکتریکی را دارید، اگر شما فرمانهای موتور را از یک اینورتر به آن اعمال کنید و سرعت را کم و یا زیاد نمایید توانستهاید تا سرعت موتور را کنترل کنید ولی مشکل اصلی زمانی پیش میآید که شما قصد داشته باشید تا سرعت موتور را روی سرعت خاص بهصورت دقیق و ثابت نگه دارید در این حالت شما نیاز به گرفتن فیدبک از موتور هستید اما این سوال پیش میآید که آیا سرعت دقیق موتور همان عددی که شما به آن اعمال کردهاید هست یا نه؟ پس یکی دیگر از کاربردهای انکودر اندازهگیری سرعت موتورها میباشد.
اندازهگیری طول و انکودر
برای تمام حالاتی که نیاز به برش است انکودر میتواند به نوار نقاله متصل شده و طول ماده ورودی را اندازهگیری نماید، در نهایت هر زمان طول مناسب وارد شد به موتور قطعکننده دستور داده تا ورق مدنظر را برش دهد.
اندازهگیری موقعیت انکودر

مواردی پیش میآید که شما میخواهید نوار نقاله موردنظرتان بهاندازهای مشخص حرکت کند و در آن نقطه توقف کند که این موضوع یکی از پرکاربردترین نوع استفاده از انکودر در صنعت مخصوصاً در ماشینآلات بستهبندی و پرکنهای صنعتی به کار گرفته میشود. برای این کار شما خروجی انکودر را اندازهگیری میکنید و با درنظرگرفتن ضرایب گیربکس و کوپلینگها مسافت طی شده را به دست میآورید، این کار بهاصطلاح کنترل موقعیت نامیده میشود.
مزایا و معایب انکودر
در این بخش بهصورت فهرستوار به مزایا و معایب آن خواهیم پرداخت:
مزایا انکودر
- درصد بالای قابلاعتماد و دقیق
- وضوح بالای انکودر
- بهروز و الکترونیکی
- ابعاد مناسب
معایب انکودر
- تداخل مغناطیسی یا رادیویی (انکودرهای مغناطیسی)
- تداخل منبع نور مستقیم (انکودرهای نوری)
- تاثیر پذیری از آلودگیهای روغنی و گردوغبار
سخن پایانی
حضور انکودر باعث شده که کارهای ما دقیقتر و بیشتر قابلاندازهگیری باشند، این تجهیز با توجه به کاربردش همچنان یکی از موارد ضروری در اتوماسیونهای نوار نقاله محور یا سرعت محور میباشد، در حال حاضر انکودرها به سمت کوچکتر، بیشتر الکترونیکی و تنومندتر شدن (حساسیت کمتر نسبت به محیط صنعتی) پیش میروند.
منابع
-
بهروز احمدی، “مرجع کامل کنترل حرکت اتوماسیون: انکودرها – سرو موتورها”، آیلار، ۱۳۹۶ ↑
-
“The Basics of How an Encoder Works“, ACCU Coder, 2019 ↑
-
Luis-Francisco Acevedo-Hueso, “Optical Simulation and Testing of an Optical Encoder”, Heriot-Watt University, 2015 ↑
-
Claus Matthias Benedict, “Rotary Encoder”, Phon, 2012 ↑
-
“Encoder Guide“, Anaheim Automation ↑
خوشحال خواهیم شد اگر شما نکته و یا تجربهای در مورد انکودر داشتهاید با ما در بخش نظرات در میان بگذارید.
راستی! برای دريافت مطالب جديد در پیج اینستاگرم PowreEn عضو شويد.







